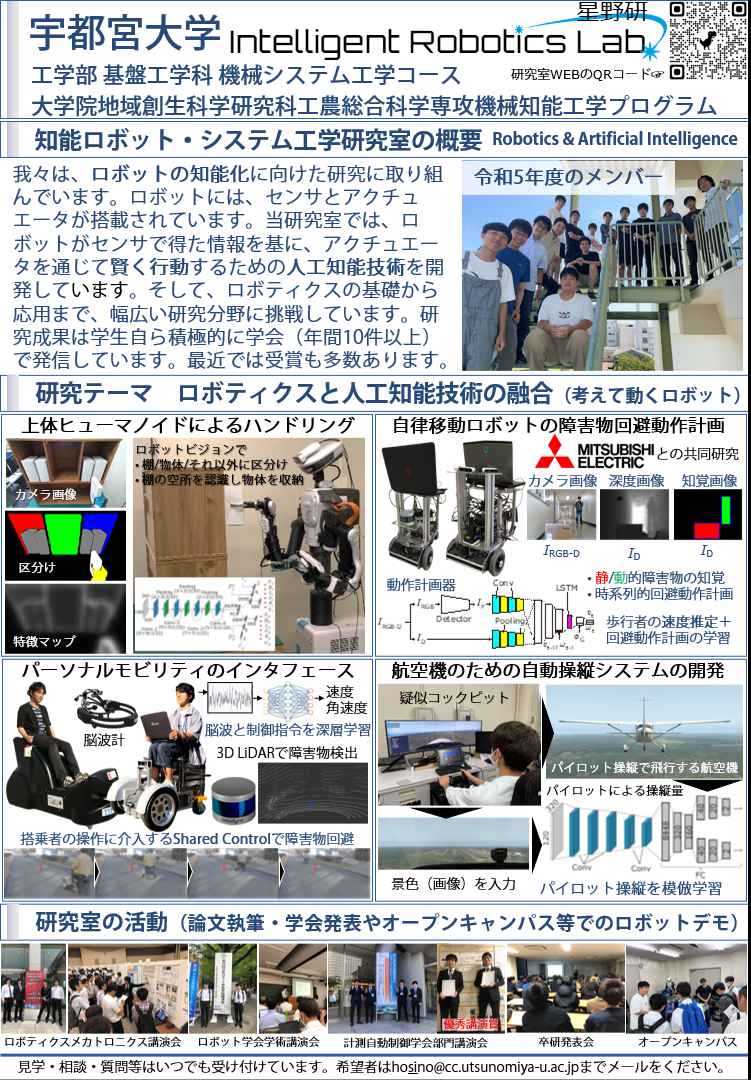
移動ロボット,ヒューマノイドロボット,人工知能,ヒューマンロボットインタラクション,群知能ロボットシステム,自動化,最適化,生産システムなど
知能ロボット・システム工学(星野)研究室のホームページ
![]()
ようこそ
研究室紹介の動画を作りました.YouTubeで限定公開しています.
2025/6/5~6
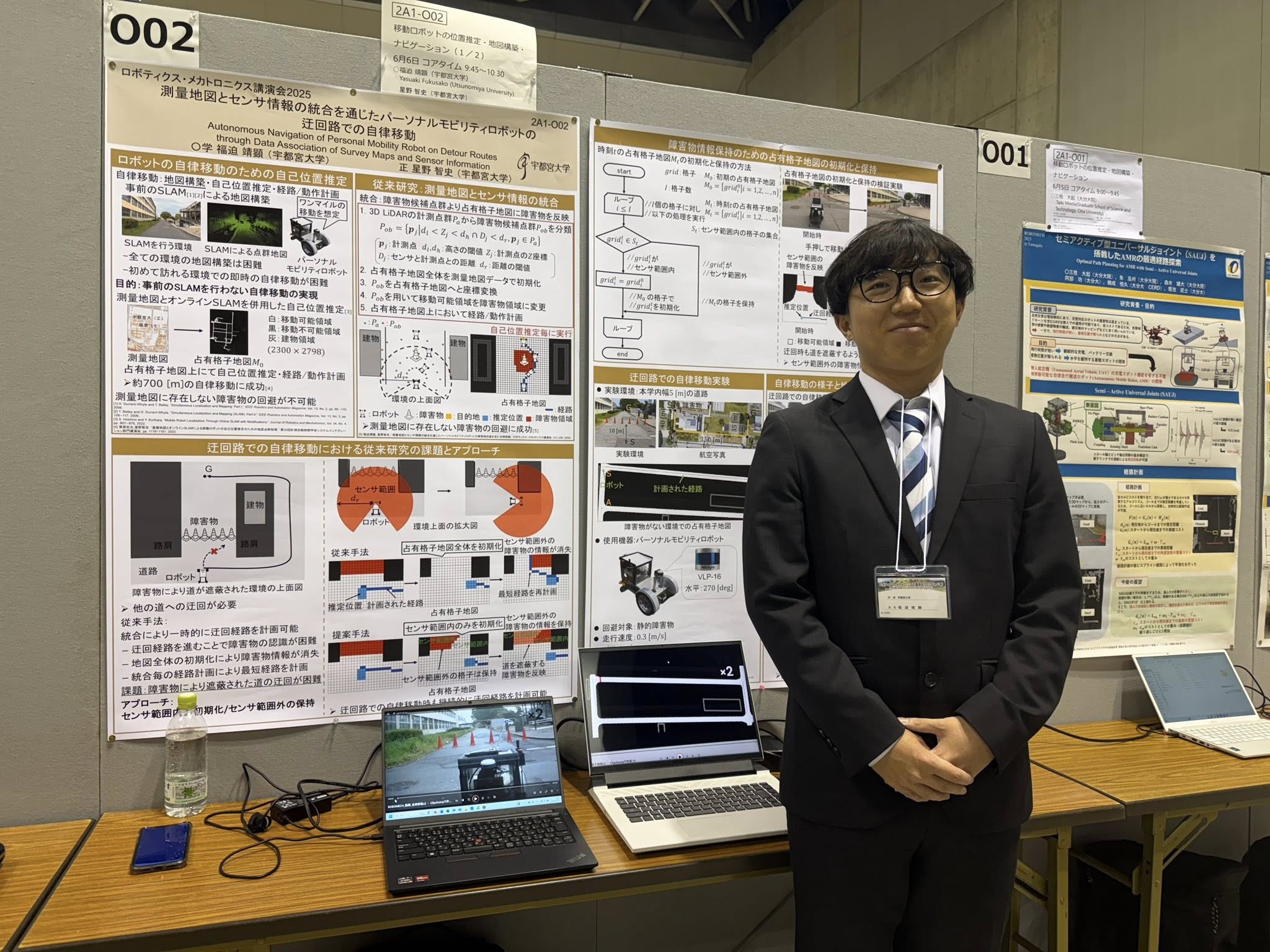
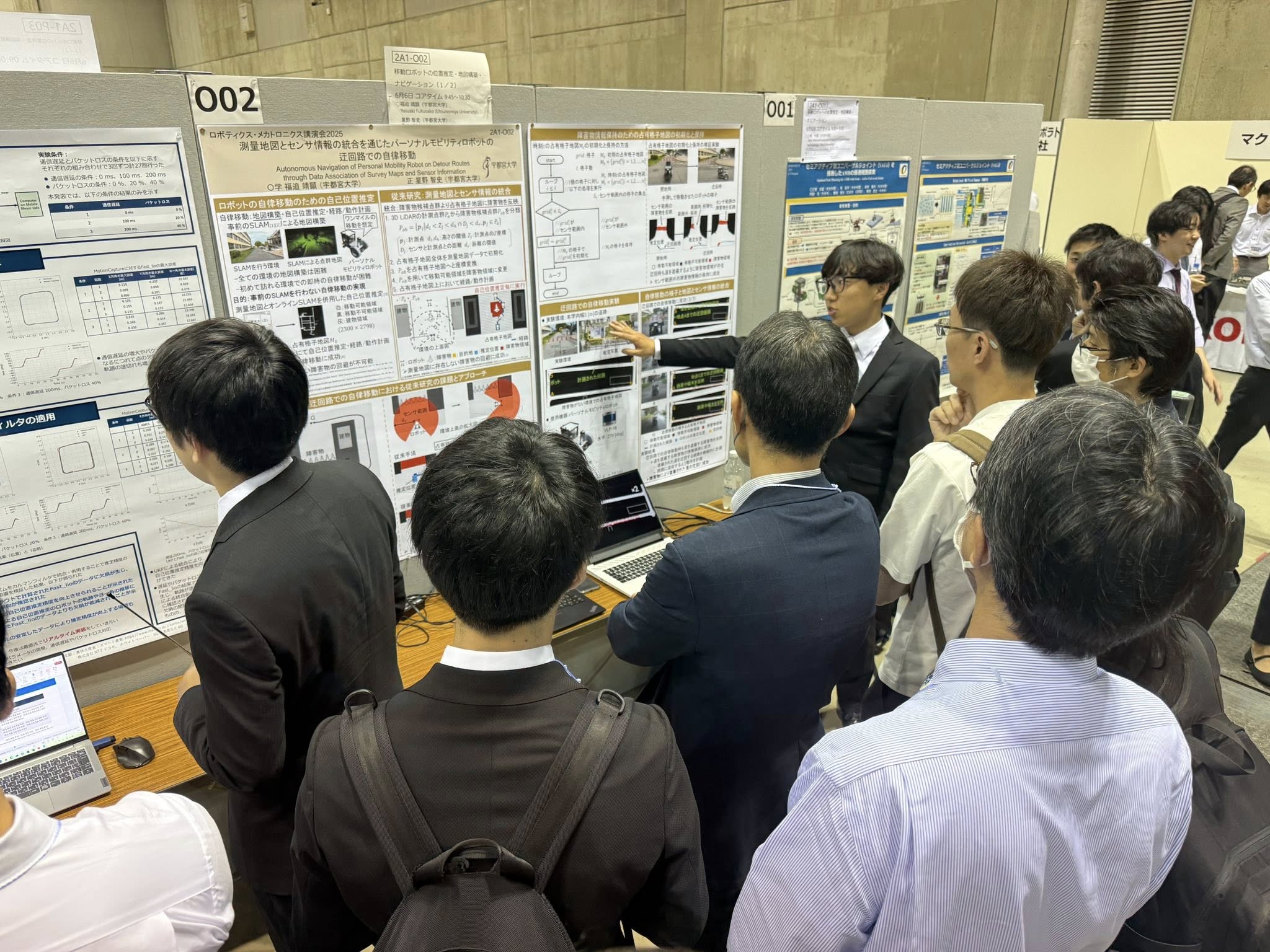
ボティクス・メカトロニクス講演会2025が,山形の山形ビッグウイングで開催されました.当研究室からは,残念ながらM2の福迫君1名のポスター発表のみとなりましたが,終始多くの方々に囲まれ,大物の先生もいる中,大変有意義な議論ができたようで良かったです.発表題目は,「測量地図とセンサ情報の統合を通じたパーソナルモビリティロボットの迂回路での自律移動」(福迫靖顕, 星野智史, 2A1-O02)です.

2025/4/25
 日本機械学会関東学生会第64回学生員卒業研究発表講演会にて,現M1(当時B4)の佐藤拓采君がBest Presentation Awardを受賞しました!一昨年の菅田君,昨年の岸君と柴田君に続き,3年連続の受賞となりました!
日本機械学会関東学生会第64回学生員卒業研究発表講演会にて,現M1(当時B4)の佐藤拓采君がBest Presentation Awardを受賞しました!一昨年の菅田君,昨年の岸君と柴田君に続き,3年連続の受賞となりました!
2025/4/11
2025年度のスタートです.4年生が5名配属され,13名の研究室となりました.人数は少し減りましたが,少数精鋭でしかも4年生については去年の2倍ぐらいパワーがありそうです!
2025/3/25
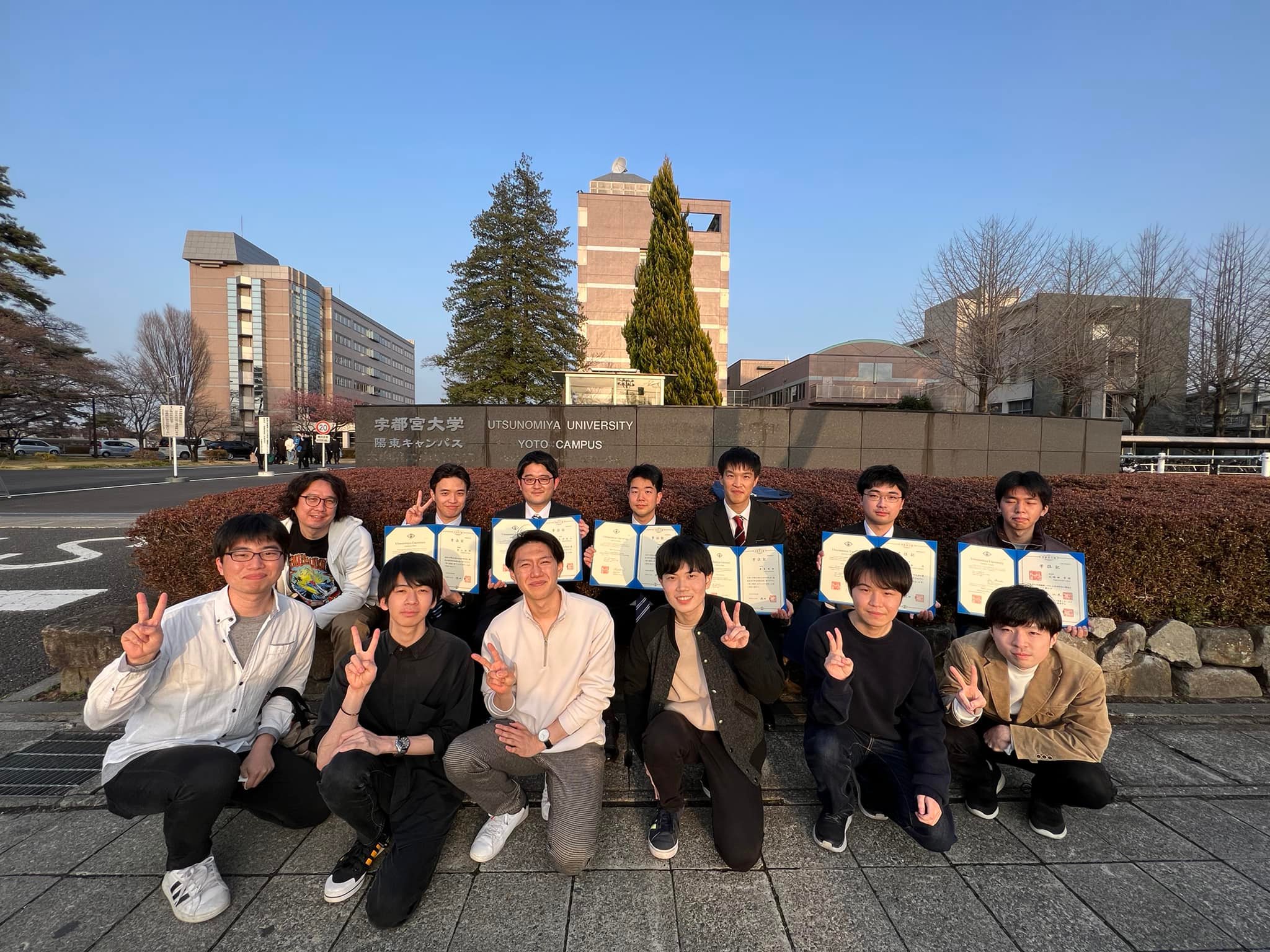
研究室の10期生8名が大学院修士課程を修了,12期生の3名が学部を卒業しました.おめでとうございます.
 前列左から
前列左から
M2 寺西雄大,M2 小山佳祐,M2 手塚弘人,M2 田中一成,M2 菅田玲央,M2 本木佑樹,M2 山内嶺,M2 山田祐輔
後列左3人目から
B4 佐藤奏哉,B4 佐藤拓采,B4 織田零央

2025/3/18
宇都宮観光コンベンション協会主催の「第3回MICEセミナー」にパネリストとしてお呼ばれし,ロボメック2024についてお話をさせていただきました.とは言え,そのほとんどは実行委員長の尾崎先生にお任せし,私は懇親会についての紹介のみでずいぶんと楽をさせていただきました.当日の様子がYouTubeにアップされましたので以下にリンクを掲載させていただきます.お耳汚しとなりますがご容赦ください.また関係者の皆様方,大変お世話になりました.
2025/3/18
M1の岸君が令和7年度宇都宮大学学生表彰をいただきました.表彰式当日,なぜか欠席したそうですが...(怒)
2025/3/13
雪舞う埼玉大学で開催された日本機械学会関東学生会第64回学生員卒業研究発表講演会にて,4年生2名が研究発表を行いました.発表題目は,織田零央「 双腕型ロボットによる下膳作業のための積み重なった物体に対する把持位置推定」,佐藤拓采「航空機塗装面の欠陥検査に向けた深層距離学習に基づく画像処理技術の提案」です.

織田君(左)と佐藤ヒロト君(右)
 織田君
織田君  佐藤ヒロト君
佐藤ヒロト君
2025/2/17
第25回計測自動制御学会システムインテグレーション部門講演会より,M1の岸君がSICE SI2024優秀講演賞をいただきました.大変おめでとうございます!
2025/2/13
令和6年度⼯農総合科学専攻機械知能⼯学プログラム修士論文発表会にて,当研究室の大学院博士前期課程2年生の小山佳祐君,菅田玲央君,田中一成君,手塚弘人君,寺西雄大君,本木佑樹君,山内嶺君,山田祐輔君の8名が発表を行いました.M2の数としては過去最多,でもみんな素晴らしい発表でした!
2025/1/21~24
ドイツのミュンヘンで開催されたSII 2025にて,研究発表を行いました.M2の山田君との共著で,発表題目は「CNN-Based Motion Planning for Object Storage by Dual-Arm Robot」(S. Hoshino and Y. Yamada, The IEEE/SICE International Symposium on System Integration 2025)です.発表内容を動画として記録したので,そちらも併せてご覧ください.
2025/1/8
新年明けましておめでとうございます.2024年は,学生による国内学会発表15件,国際会議発表1件,学術論文1件と,過去で最も多い研究業績となりました.星野も微力ながら,国内学会発表1件,国際会議発表2件,学術論文1件と最低限の足跡は残せたかと...2025年もこの勢いでがんばりましょう!本年もよろしくお願い申し上げます.
2024/12/23
中日新聞様より警備ロボットについての取材を受け,記事に掲載していただきました.
2024/12/23
2024年の忘年会,早期配属の3年生も顔を出してくれたので過去最大人数での開催となりました.
2024/12/18~20
第25回計測自動制御学会システムインテグレーション部門講演会にて,6名が研究発表を行いました.発表題目は,「複数の動的障害物に対するオープンスペース差分画像を用いた移動ロボットによる回避動作計画」(柴田健志, 菅田玲央, 小池正英, 太田悠介, 星野智史, pp. 807~812),「移動ロボットによる複数の動的障害物に対するオプティカルフロー画像を用いた回避動作計画」(菅田玲央, 柴田健志, 小池正英, 太田悠介, 星野智史, pp. 830~835),「路面のセグメンテーション画像に基づくパーソナルモビリティと搭乗者のShared Controlを通じた運転アシスト」(小山佳祐, 星野智史, pp. 1440~1444),「双腕型ロボットによる複数の物体が置かれた棚への収納動作計画」(山田祐輔, 星野智史, pp. 938~943),「滑走路のセグメンテーション画像を入力とした航空機の自動操縦器に対する模倣学習」(寺西雄大, 田中一成, 星野智史, pp. 2675~2679), 「パーソナルモビリティの運転アシストのための歩行者検出を通じたオンラインSLAM」(岸敬大, 小山佳祐, 星野智史, pp. 4007~4012)です.
 左から山田君,柴田君,菅田君,小山君,岸君,寺西君@アイーナ いわて県民情報交流センター
左から山田君,柴田君,菅田君,小山君,岸君,寺西君@アイーナ いわて県民情報交流センター
菅田君はSI2023に引き続き,山田君はRSJ2024から連続,M1の岸君と柴田君は2024年のロボメック,RSJ,SI全て発表のグランドスラム達成!6名全員素晴らしい発表でした.
 柴田君
柴田君  菅田君
菅田君  小山君
小山君
 山田君
山田君  寺西君
寺西君  岸君
岸君
 うちあげ~
うちあげ~
2024/11/24
当研究室から5名のM1が大学院での研究の中間発表を行ました.
2024/9/19
日本ロボット学会誌のVol. 42,No. 7,pp. 684~687(https://doi.org/10.7210/jrsj.42.684)に論文(レター)が掲載されました.論文タイトルは「障害物のオプティカルフロー画像を用いた移動ロボットの回避動作計画」です.
2024/9/4~6
日本ロボット学会 第42回 学術講演会にて,M2の山田君,M1の岸君と山田君が研究発表を行いました.発表題目は,「双腕型ロボットによる空所画像生成を通じた物体の収納動作」(山田 祐輔, 星野智史, RSJ2024AC2F3-04),「パーソナルモビリティの運転アシストのためのオンラインSLAMと人工ポテンシャル法に基づくShared Control」(岸敬大, 小山佳祐, 星野智史, RSJ2024AC2G3-03),「移動ロボットによる動的障害物回避のためのオープンスペース差分画像を入力とした動作計画」(柴田健志, 菅田 玲央, 小池正英, 太田悠介, 星野智史, RSJ2024AC3H2-07)です.

左から岸君,山田君,柴田田君@大阪工業大学梅田キャンパス


 山田君は去年のRSJ2023と連続,岸君と柴田君はロボメック2024からの連続発表となりました.素晴らしい発表でした.
山田君は去年のRSJ2023と連続,岸君と柴田君はロボメック2024からの連続発表となりました.素晴らしい発表でした.
2024/8/29
SICE Festival 2024にて,M1の柴田君が英語で研究成果を発表しました.発表題目は「Open-Space-Based Motion Planner of Mobile Robot for Multiple Obstacle Avoidance」(K. Shibata and S. Hoshino, Annual Conference of the Society of Instrument and Control Engineers of Japan 2024, pp. 770-775)です.対面・オンラインのハイブリッド開催だったため,事前に発表動画もアップロードしました.ご興味のある方は是非ご覧ください.
2024/7/20
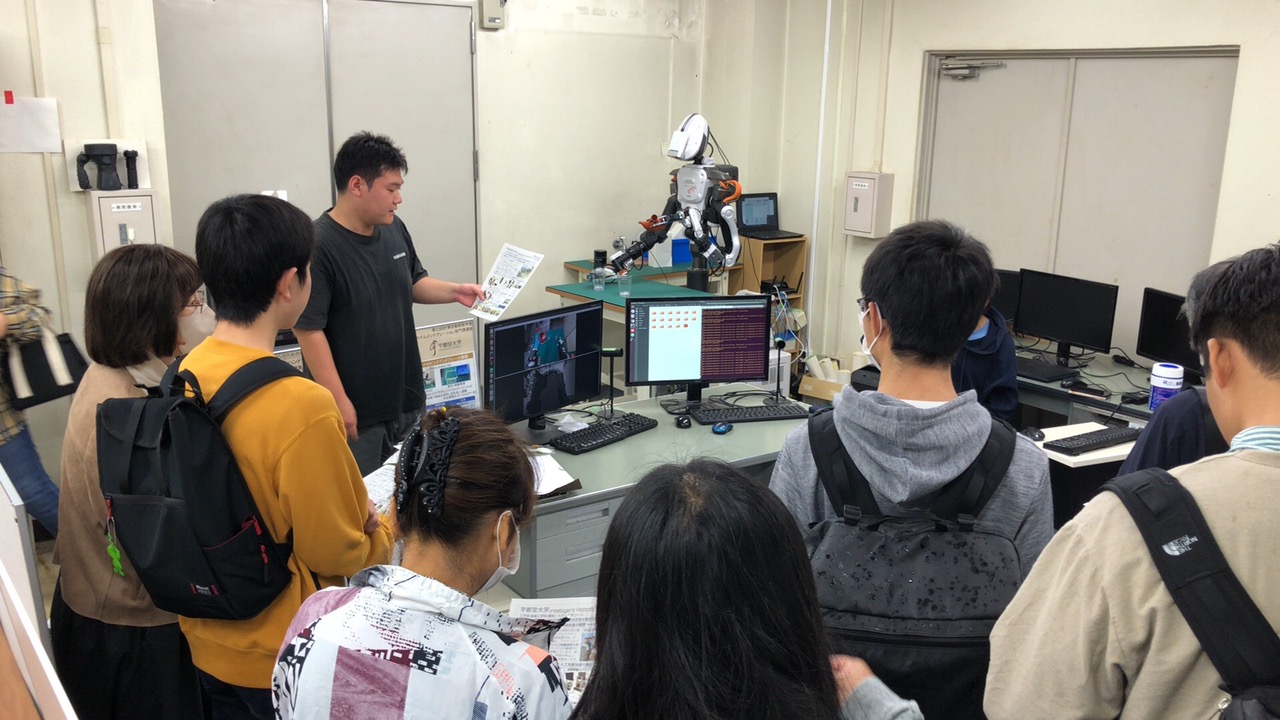
オープンキャンパスが開催されました.高校生や大学生,多くの方々に研究室を見学していただきました.どうもありがとうございました.
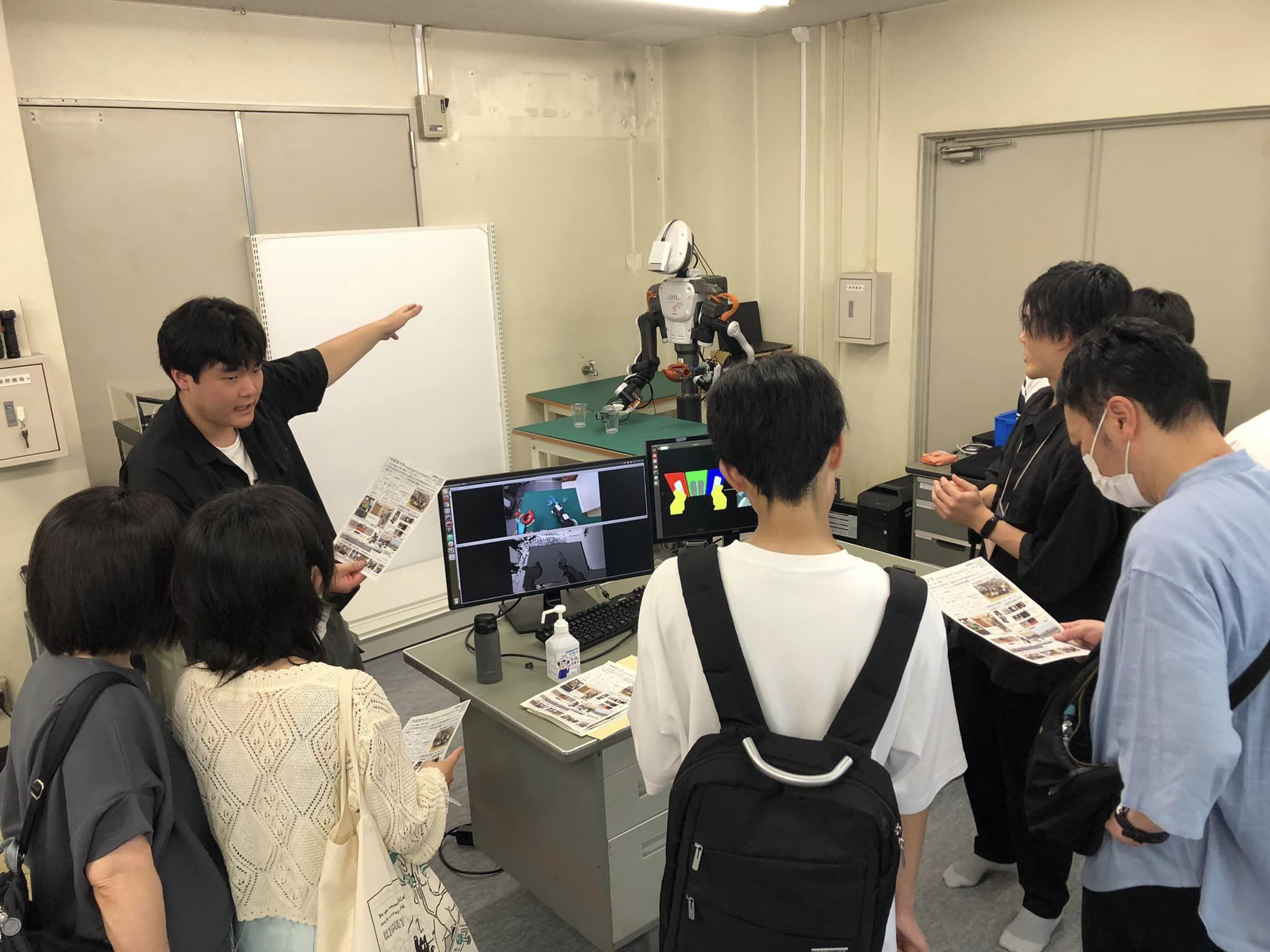
 (1階実験室)
(1階実験室)
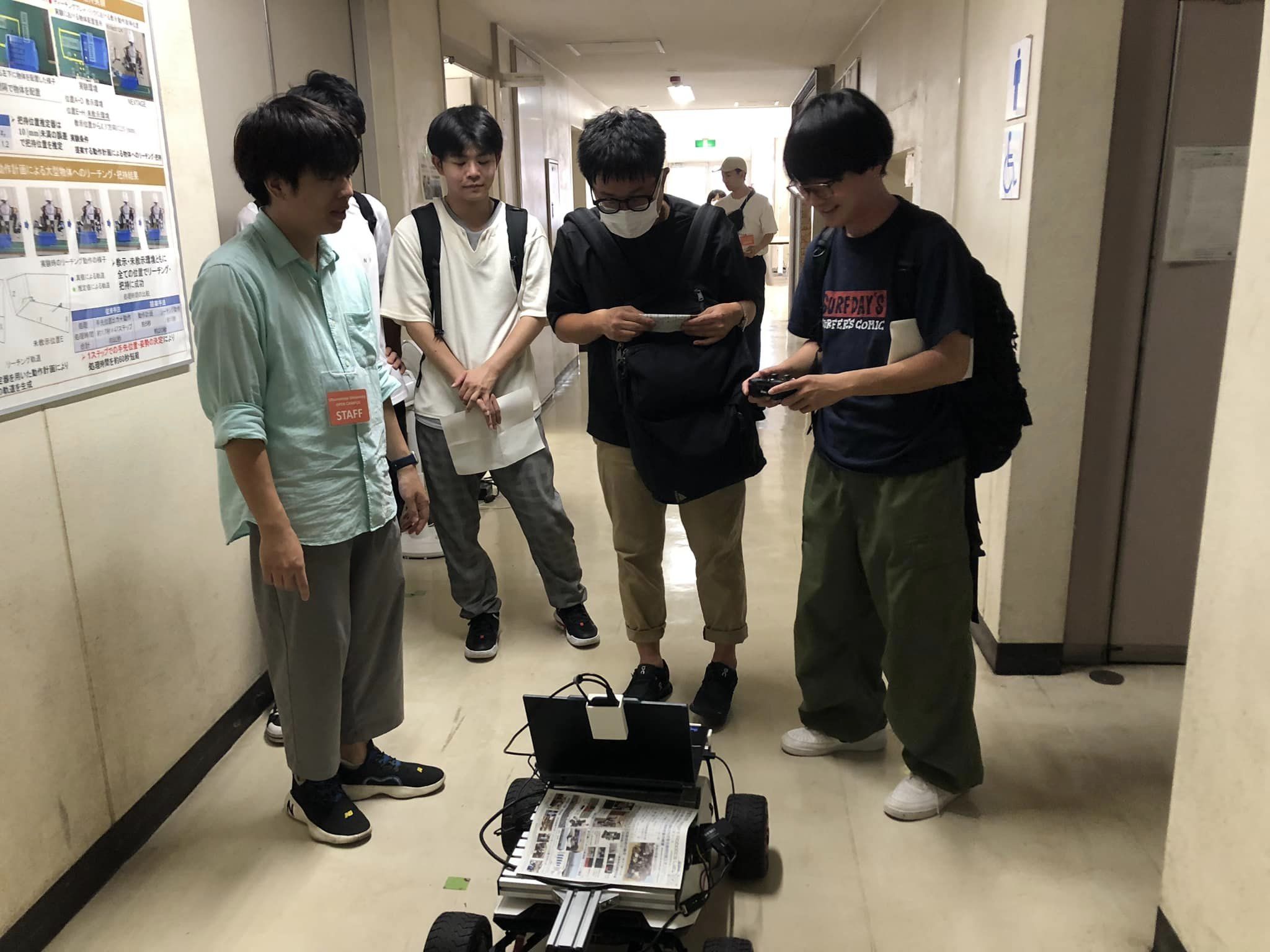 (1階廊下)
(1階廊下)  (屋外)
(屋外)
2019/2/2
2ヶ月間のイタリアパドヴァ大学での研究活動を終え,無事日本に帰ってきました.IAS-Labの皆様,大変お世話になりました.
 (エマ先生と)
(エマ先生と)  (ヨーロピアンスタイル?)
(ヨーロピアンスタイル?)  (運河に映えるキャンパス)
(運河に映えるキャンパス)  (IAS-Labのメンバー)
(IAS-Labのメンバー)  (お別れパーティー)
(お別れパーティー)
2015/9/1
UCSB(University of California Santa Barbaraカリフォルニア大学サンタバーバラ校)での一年間の研究活動を終え,日本に帰ってきました.「サンタバーバラの生活はどうだった?」と聞かれれば,「ええ,最高でしたよ」としか答えられないぐらい,人も気候も大学も,すべてが楽園のようなすばらしい町でした.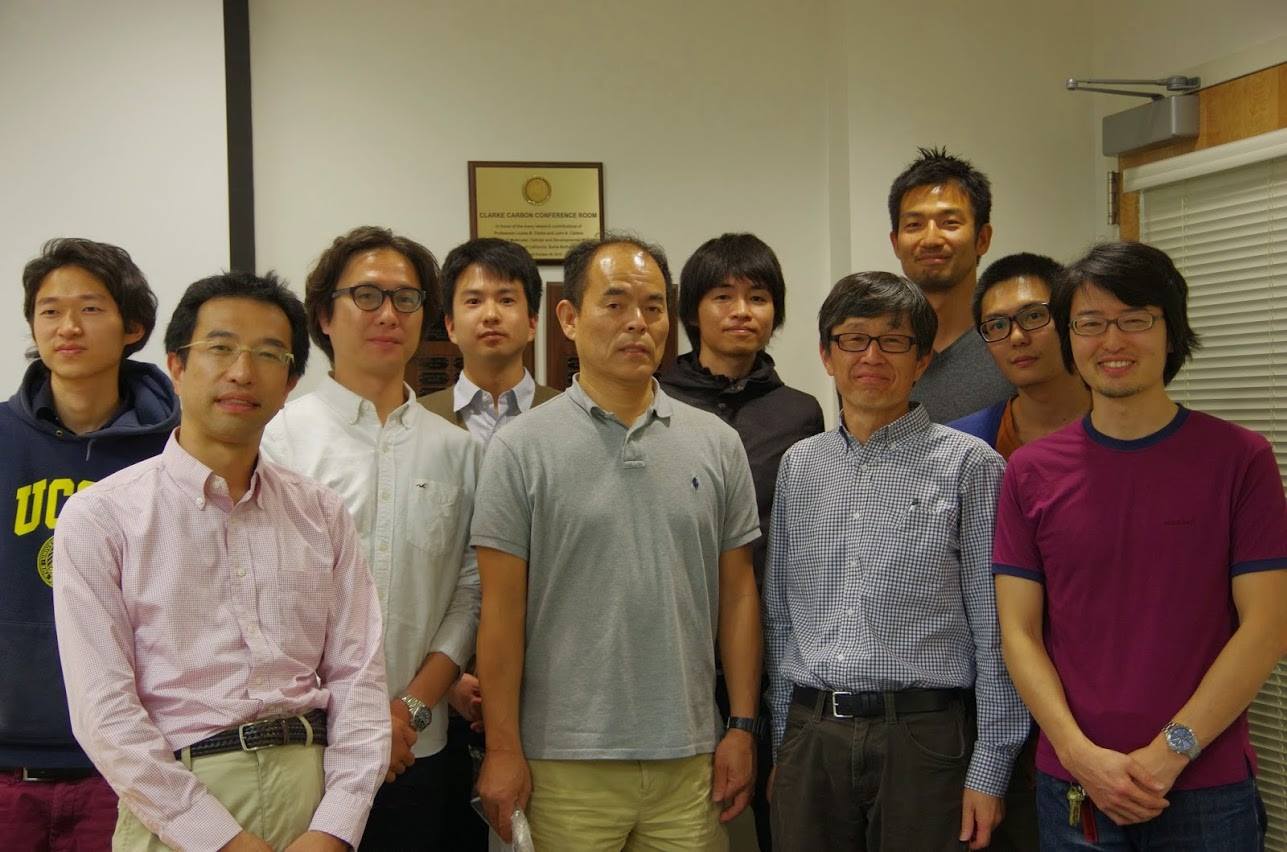 (祝中村先生ノーベル賞受賞!)
(祝中村先生ノーベル賞受賞!)  (カリフォルニアスタイル)
(カリフォルニアスタイル)  (フランチェスコ先生と)
(フランチェスコ先生と)
 (Engineering II)
(Engineering II)  (現地日本人会の皆様とFarewell Party)
(現地日本人会の皆様とFarewell Party)  (ゴリータビーチ)
(ゴリータビーチ)
2024/5/30~31
ボティクス・メカトロニクス講演会2024が,初めて宇都宮で開催されました.星野は実行副委員長を務めさせていただきました.当研究室からは,6名と星野がポスター発表を行いました.発表題目は,「航空機の着陸飛行における下降と引き起こしシナリオの時系列分類を通じた自動操縦器の模倣学習」(田中一成, 星野智史, 1A1-A07),「測量地図とセンサ情報の統合を通じたパーソナルモビリティロボットの障害物回避を含む自律移動」(福迫靖顕, 星野智史, 1A1-J09),「ロボットによる把持位置推定を通じた双腕での大型物体へのリーチング」(金子正弘, 山田祐輔, 星野智史, 1P1-H10),「複数の障害物に対するオープンスペースに着目した移動ロボットによる回避動作計画」(柴田健志, 菅田玲央, 渡邊友樹, 太田悠介, 星野智史, 2A1-N06),「パーソナルモビリティの運転アシストを目的とした路肩逸脱回避のためのShared Control」(小山佳祐, 星野智史, 2A2-C07),「パーソナルモビリティの運転アシストのためのセンサフュージョンによるShared Control」(岸敬大, 小山佳祐, 星野智史, 2P1-O03),「移動ロボットによる複数の動的障害物回避のための深度差分画像を入力とした動作計画法」(星野智史, 久保田有羽, 2P2-N05)です.
初日の懇親会では,余興でU字工事さんにお越しいただきました.また,二日目には福田富一栃木県知事にもお越しいただき,M1の岸君が,栃木県と共同で製作したパーソナルモビリティロボットに関する研究成果をご説明させていただきました.
左から岸君,福迫君,田中君,小山君,柴田君,金子君
 田中君
田中君  福迫君
福迫君  金子君
金子君
 柴田君
柴田君  小山君
小山君  岸君
岸君  星野(笑)
星野(笑)
2024/4/16
 日本機械学会関東学生会第63回学生員卒業研究発表講演会にて,現M1(当時B4)の岸君と柴田君がBest Presentation Awardを受賞しました!去年の菅田君に続き2年連続,しかも今年はダブルでの受賞となりました!
日本機械学会関東学生会第63回学生員卒業研究発表講演会にて,現M1(当時B4)の岸君と柴田君がBest Presentation Awardを受賞しました!去年の菅田君に続き2年連続,しかも今年はダブルでの受賞となりました!
2024/4/16
ロボティクス・メカトロニクス 講演会 2024の5月開催に向け,宇都宮市長を表敬訪問して参りました.
2024/4/11
2024年度のスタートです.当研究室に4年生が5名配属され,過去最多18名の大所帯となりました.
2024/3/22
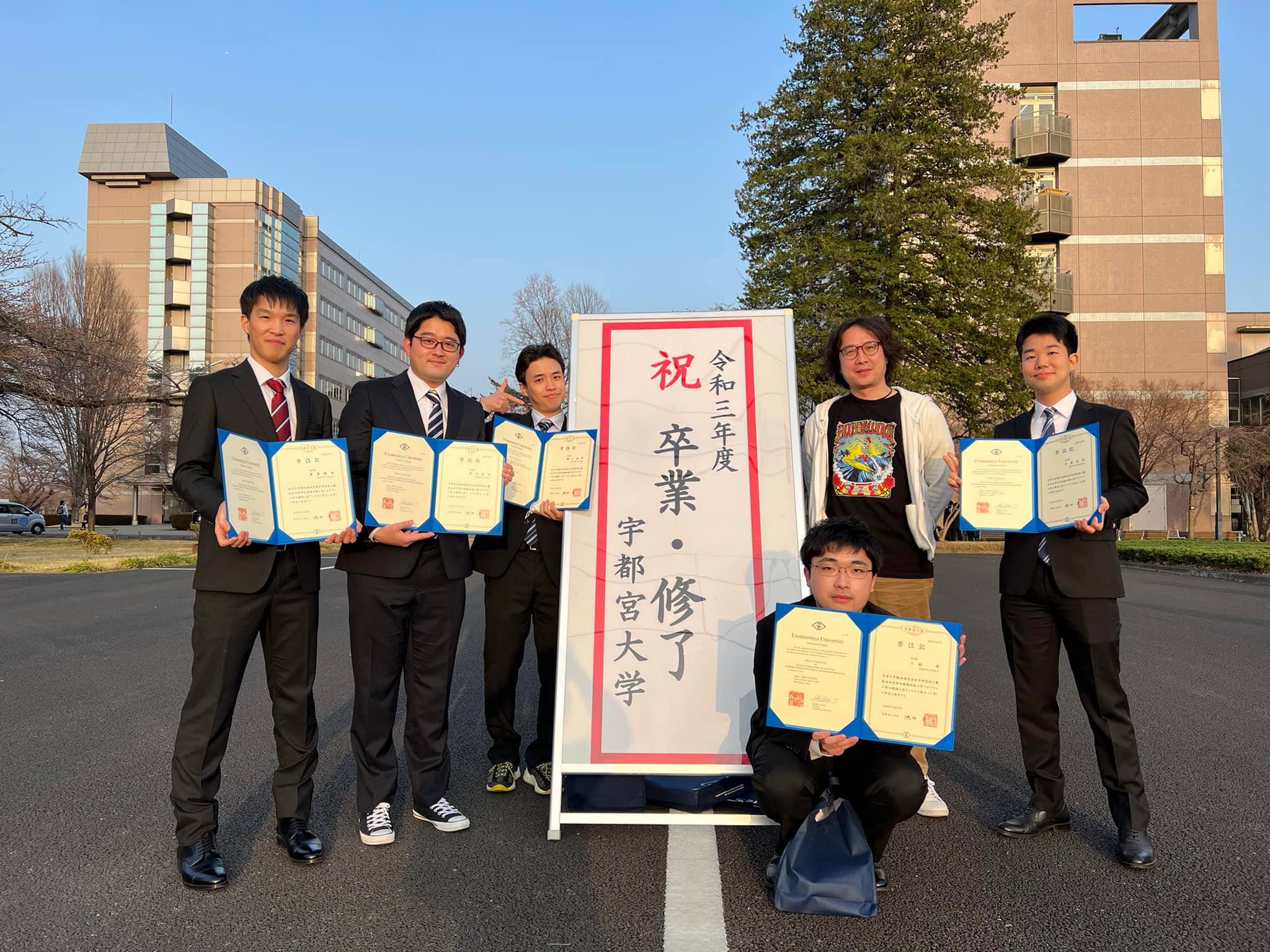
研究室の9期生1名が大学院修士課程を修了,11期生の5名が学部を卒業しました.おめでとうございます.

前列左から
B4 福迫靖顕,B4 金子正弘,B4 柴田健志,M2 久保田有羽,B4 舘野隆一,B4 岸敬大

B4の柴田君が当研究室初の日本機械学会畠山賞を受賞しました!
2024/3/15
研究室のOBで2期生の滝沢君が,ご結婚の報告に来てくれました.研究室では農工連携の群ロボット研究(動画はこちら)に取り組み,大学院修了後は日立製作所に勤務されています.大変おめでとうございます!そして,末永くお幸せに.
2024/3/13
早稲田大学の西早稲田キャンパスで開催された日本機械学会関東学生会第63回学生員卒業研究発表講演会にて,4年生4名が研究発表を行いました.発表題目は,金子正弘「双腕型ロボットによる大型物体に対する把持位置・姿勢推定に基づいたハンドリング」,岸敬大「パーソナルモビリティのShared Controlによる運転アシストのためのセンサフュージョン」,柴田健志「オープンスペースに着目した移動ロボットのEnd-to-End動作計画」,福迫靖顕「測量地図と環境に対するセンサ情報のデータ統合を通じたパーソナルモビリティロボットの自律移動」です.
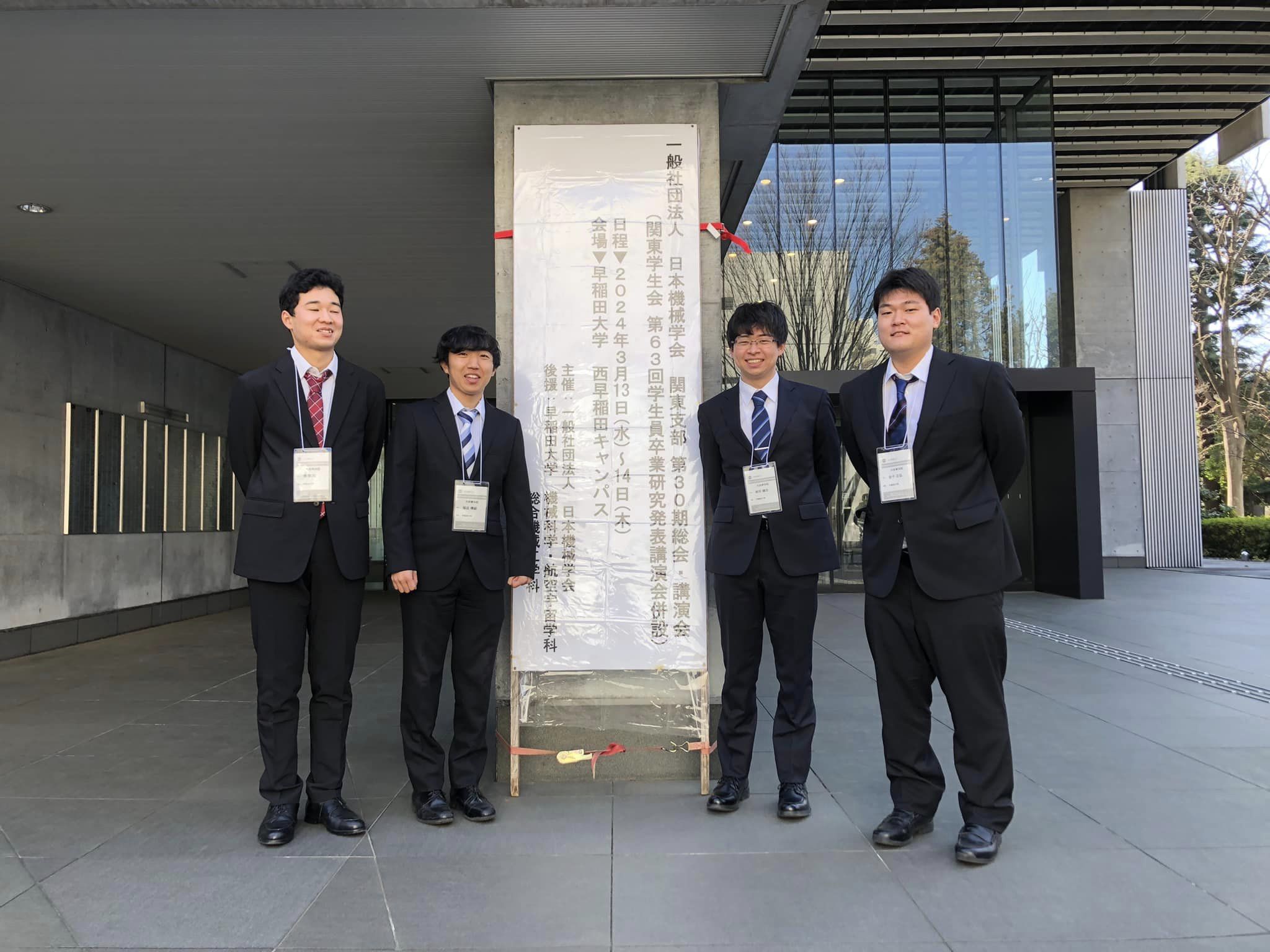
左から岸君,福迫君,柴田君,金子君

 4年ぶり?の対面形式での卒研発表会では,多くの方から貴重な質問やコメントをいただきました.お疲れ様でした.
4年ぶり?の対面形式での卒研発表会では,多くの方から貴重な質問やコメントをいただきました.お疲れ様でした.
2024/2/16
令和5年度⼯農総合科学専攻機械知能⼯学プログラム修士論文発表会にて,当研究室の大学院博士前期課程2年生の久保田有羽君が発表を行いました.
2024/2/15
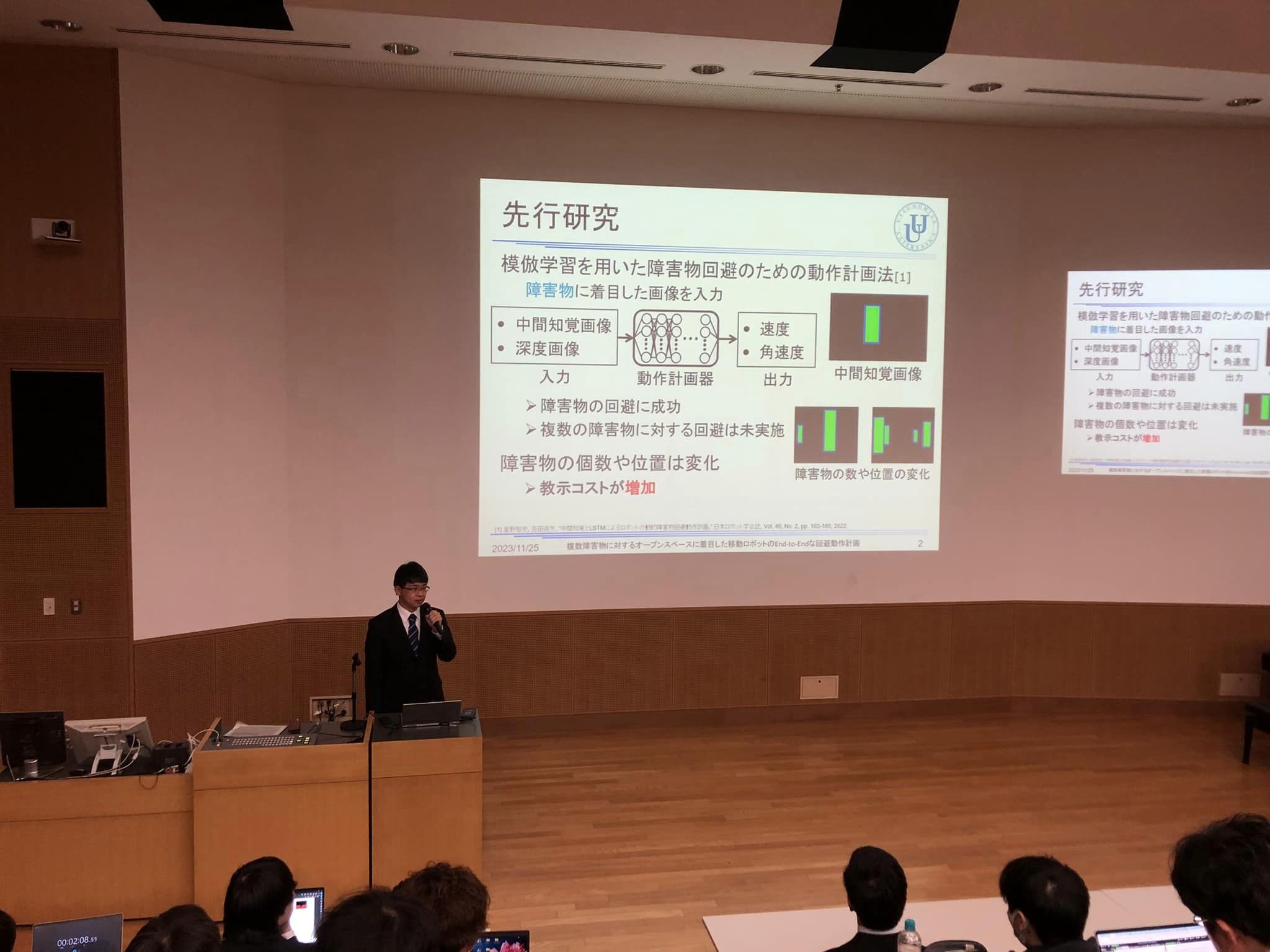
M2の久保田君と6期生の吉田君との共著の論文が,SICE Journal of Control, Measurement, and System IntegrationのVol. 17,No. 1,pp. 19~30に掲載されました(doi: 10.1080/18824889.2024.2307684).論文タイトルは「Motion planner based on CNN with LSTM through mediated perception for obstacle avoidance」です.移動ロボットによる障害物回避のための所謂E2E系動作計画に関する研究成果です.動作計画器への入力画像に前処理を施し「中間知覚画像」とすることで,特定の障害物に対する回避動作を教示するだけで,ロボットは他の障害物も避けられるようになります.しかも,動的・静的障害物の知覚ができるので,それぞれの障害物に応じた回避動作も計画できます.さらに,深度の差分画像から障害物の速度を推定することで,速度の高低に応じた回避動作の計画にも成功しました.
2024/1/8~11
ベトナムのハロンで開催されたSII 2024にて,数年ぶりに海外対面での研究発表を行いました.8期生 鵜沼君,7期生 田上君との共著で,発表題目は「LiDAR Scan Images for Mobile Robot Motion Planners」(S. Hoshino and K. Unuma, The IEEE/SICE International Symposium on System Integration 2024)と,「Fail-Safe Controller for Personal Mobility Vehicles with BMI」(S. Hoshino and T. Tagami, The IEEE/SICE International Symposium on System Integration 2024)です.運営側が写真を撮影してくれたので,久しぶりに自らの発表の様子を掲載します...


2023/12/19
2023年もあっという間の年の瀬.今年は久しぶりに対面での研究室忘年会ができました.さて,年が明けたら修論・卒論に向けてのラストスパートです!がんばりましょう!
2023/12/14~16
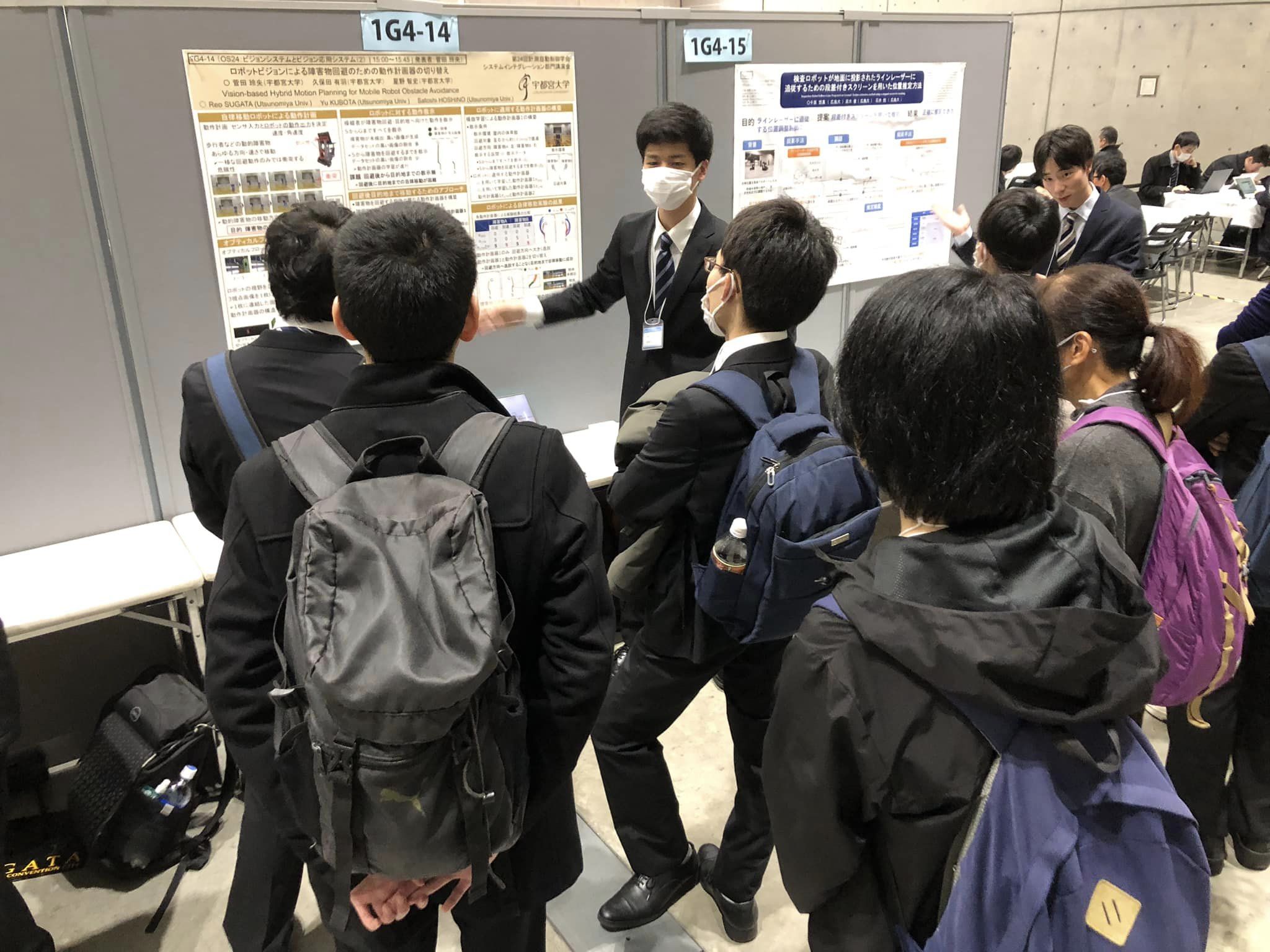
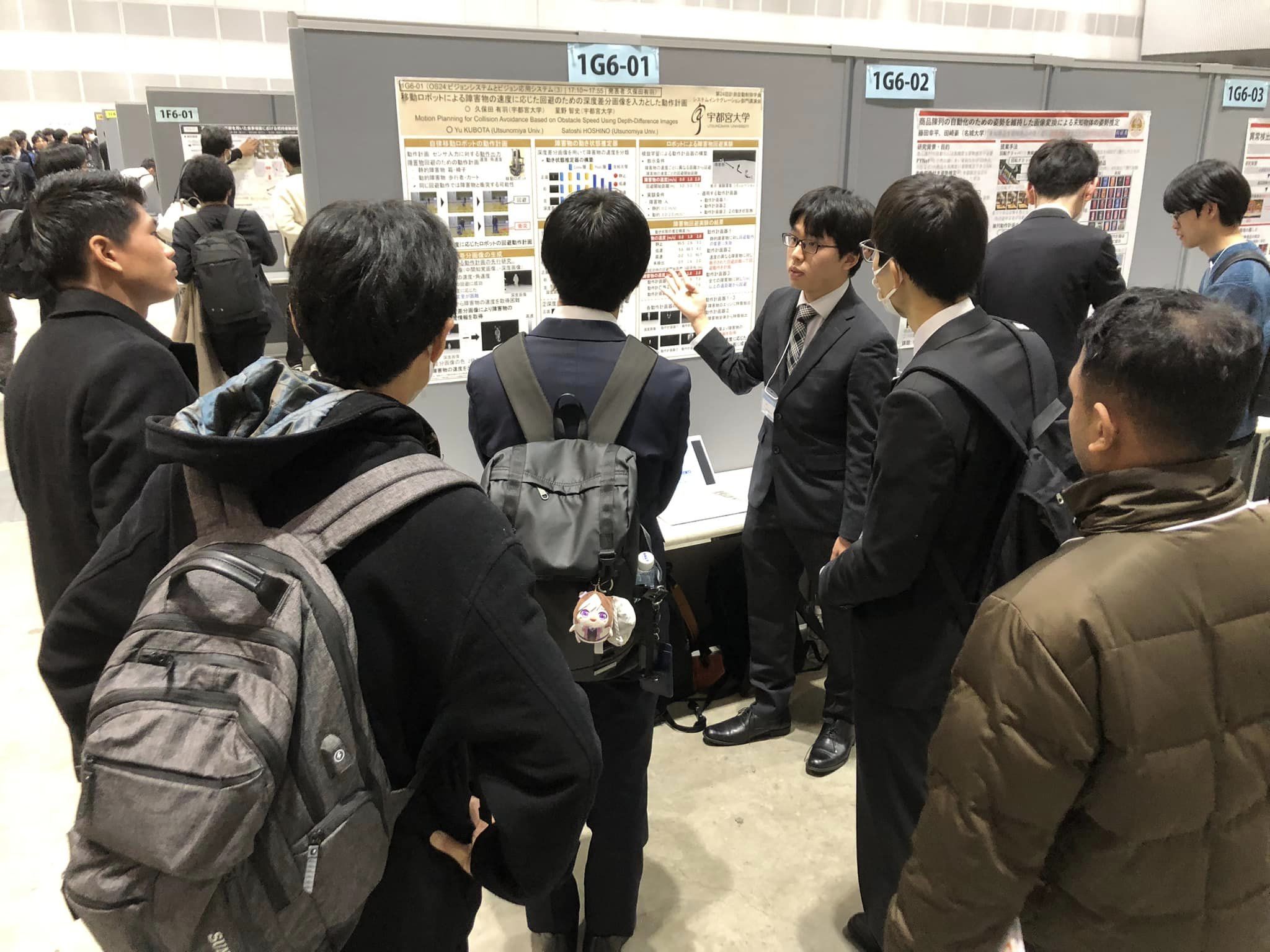
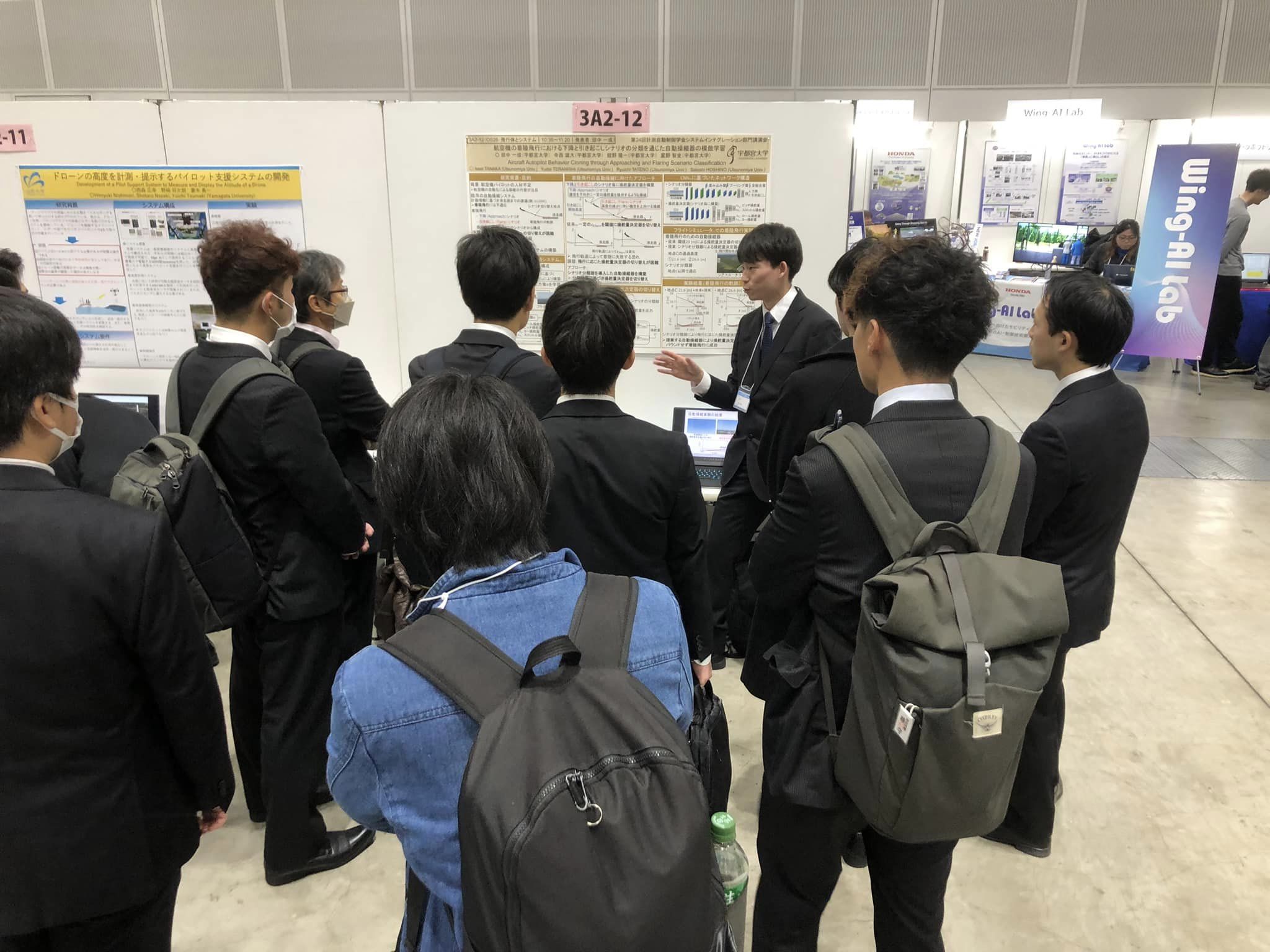
第23回計測自動制御学会システムインテグレーション部門講演会にて,3名が研究発表を行いました.発表題目は,「ロボットビジョンによる障害物回避のための動作計画器の切り替え」(菅田玲央, 久保田有羽, 星野智史, pp. 1295~1300),「移動ロボットによる障害物の速度に応じた回避のための深度差分画像を入力とした動作計画」(久保田有羽, 星野智史, pp. 1341~1346),「航空機の着陸飛行における下降と引き起こしシナリオの分類を通じた自動操縦器の模倣学習」(田中一成, 寺西雄大, 舘野隆一, 星野智史, pp. 2626~2631)です.
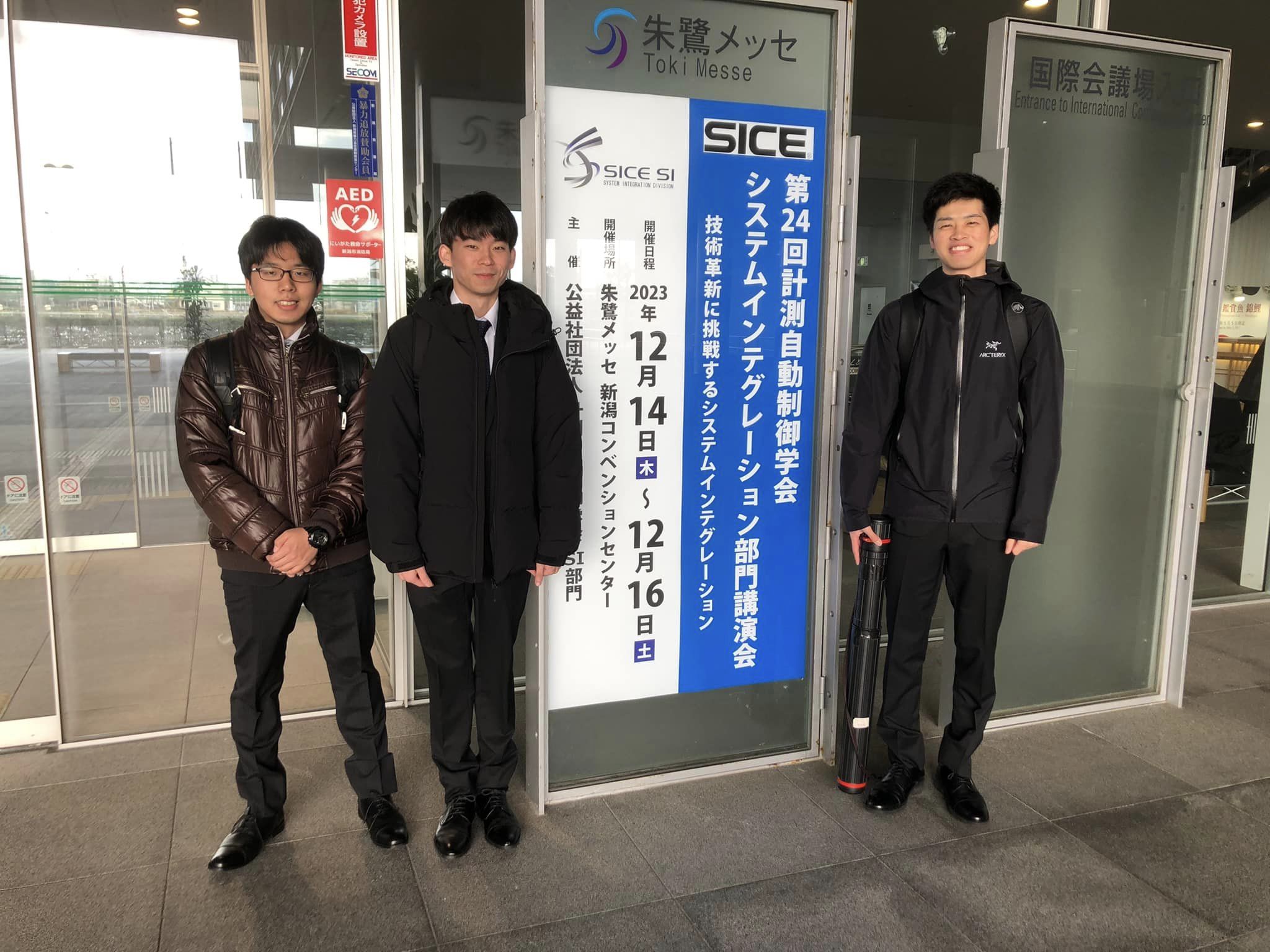
左から久保田君,田中君,菅田君

2023/11/26
前日のワークショップに続き,日曜日は大学院生の中間発表会でした.当研究室からは8名(!)のM1が発表を行い,先生方から大変貴重な質問やコメントをいただきました.
2023/11/25
当研究室4年生の柴田君が,東京大学柏キャンパスで開催された2023年度 先端ロボット工学合同ワークショップにて研究発表を行いました.皆さん,大変お疲れ様でした.

2023/11/14
遅ればせながら,2023年度版の研究室紹介のチラシが出来上がりましたので公開します.
2023/10/28
秋のオープンキャンパスが開催されました.この日の午前中は生憎の雨となってしまい,外でのロボットデモができませんでしたが,それでも多くの方々に研究室を見学していただきました.どうもありがとうございました.



2023/9/12~14
日本ロボット学会 第41回 学術講演会にて,M1の小山君,菅田君,山田君が研究発表を行いました.発表題目は,「パーソナルモビリティの操縦アシストのための人工ポテンシャル法に基づくShared Controlの提案」(小山佳祐, 星野智史, RSJ2023AC3F3-04),「障害物のオプティカルフロー画像を用いた移動ロボットの回避動作計画」(菅田玲央, 久保田有羽, 渡邊友樹, 太田悠介, 星野智史, RSJ2023AC1H4-02),「双腕型ロボットによる模倣学習を通じた物体の収納動作」(山田祐輔, 村上慧晟, 星野智史, RSJ2023AC3E3-07)です.

左から小山君,山田君,菅田君@仙台国際センター


 多くの方々に聞いていただき,大変有意義な学会となりました.私(星野)はそれをただ黙って見ているだけで,年々存在感がなくなっているような...3人ともお疲れさまでした.
多くの方々に聞いていただき,大変有意義な学会となりました.私(星野)はそれをただ黙って見ているだけで,年々存在感がなくなっているような...3人ともお疲れさまでした.
2023/9/7
SICE2023にて,星野が研究成果を数年ぶりに対面かつ英語で発表しました.発表題目は「Mobile Robot Motion Planning through Obstacle State Classifier」(S. Hoshino and Y. Kubota, Proceedings of the SICE Annual Conference 2023, pp. 120-126)です.対面・オンラインのハイブリッド開催だったため,事前に発表動画もアップロードしました.ご興味のある方は是非ご覧ください.
2023/7/17
4年ぶりに対面にてオープンキャンパスが開催されました.高校生や大学生,多くの方々に研究室を見学していただきました.どうもありがとうございました.

 (1階実験室)
(1階実験室)
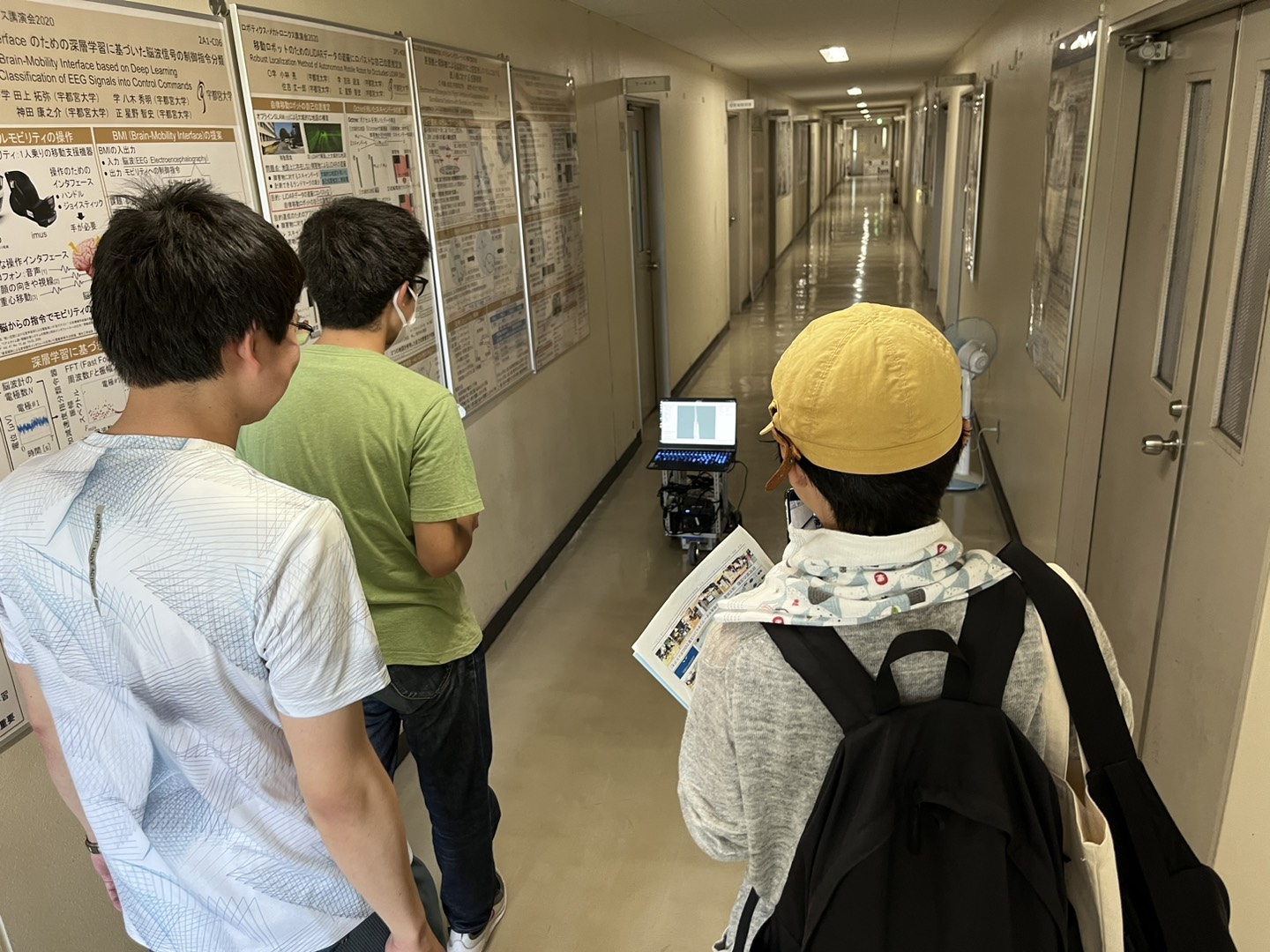 (4階廊下)
(4階廊下)  (屋外)
(屋外)
2023/4/4
2023年度のスタートです.当研究室に4年生が5名配属され,大学院からも3名が加わり,総勢14名の体制となりました.
2023/3/24
研究室の8期生7名が大学院修士課程を修了しました.氏家君,鵜沼,栗原君,塚越君,村上君,吉田君,若狭君,おめでとうございます.
2023/3/17

M2の氏家君と栗原君が令和4年度宇都宮大学学生表彰をいただきました.
2023/3/16
日本機械学会関東学生会第62回学生員卒業研究発表講演会にて4年生3名が研究発表(オンライン)を行いました.発表題目は,小山佳祐「パーソナルモビリティの操縦アシストを目的とした人工ポテンシャル法に基づくShared Controlの提案」,菅田玲央「障害物のオプティカルフローを用いた移動ロボットの回避動作計画」,山田祐輔「双腕型ロボットによる物体収納のための動作の模倣学習」です.
菅田君がBest Presentation Awardを受賞しました!
2023/2/16
令和4年度⼯農総合科学専攻機械知能⼯学プログラム修士論文発表会にて,当研究室の大学院博士前期課程2年生7名が発表を行いました.
2023/2/15

第23回計測自動制御学会システムインテグレーション部門講演会より,M2の氏家君と栗原君がSICE SI2022優秀講演賞をいただきました.去年の小林君に続き2年連続,しかも今年はダブルでの受賞となりました!
2023/2/14
令和4年度機械システム工学科卒業研究発表会にて,当研究室の4年生5名が発表を行いました.お疲れ様でした.
2023/1/21
日本ロボット学会誌のVol. 41,No. 1に,7期生の齋藤陽都君と小林亮君の研究成果が学術論文として掲載されました.これまでに学生が筆頭著者のショートペーパーはありましたが,初めてフルペーパーとしての採録です.論文タイトルは「テンプレートマッチングに色差エッジ画像を用いた背景差分法による警備ロボットの空間変化検知」(pp. 72~81)と「移動ロボットのための環境変化にロバストなパーティクルフィルタに基づく自己位置推定の観測モデル」(pp. 92~101)です.齋藤君と小林君おめでとう!
2023/1/17~20
アメリカのアトランタで開催されたSII 2023にて,星野がオンラインで研究発表を行いました.M2の鵜沼君との共著で,発表題目は「End-To-End Motion Planners through Multi-Task Learning for Mobile Robots with 2D LiDAR」(S. Hoshino and K. Unuma, The IEEE/SICE International Symposium on System Integration, pp. 636-641)です.
2022/12/14~16
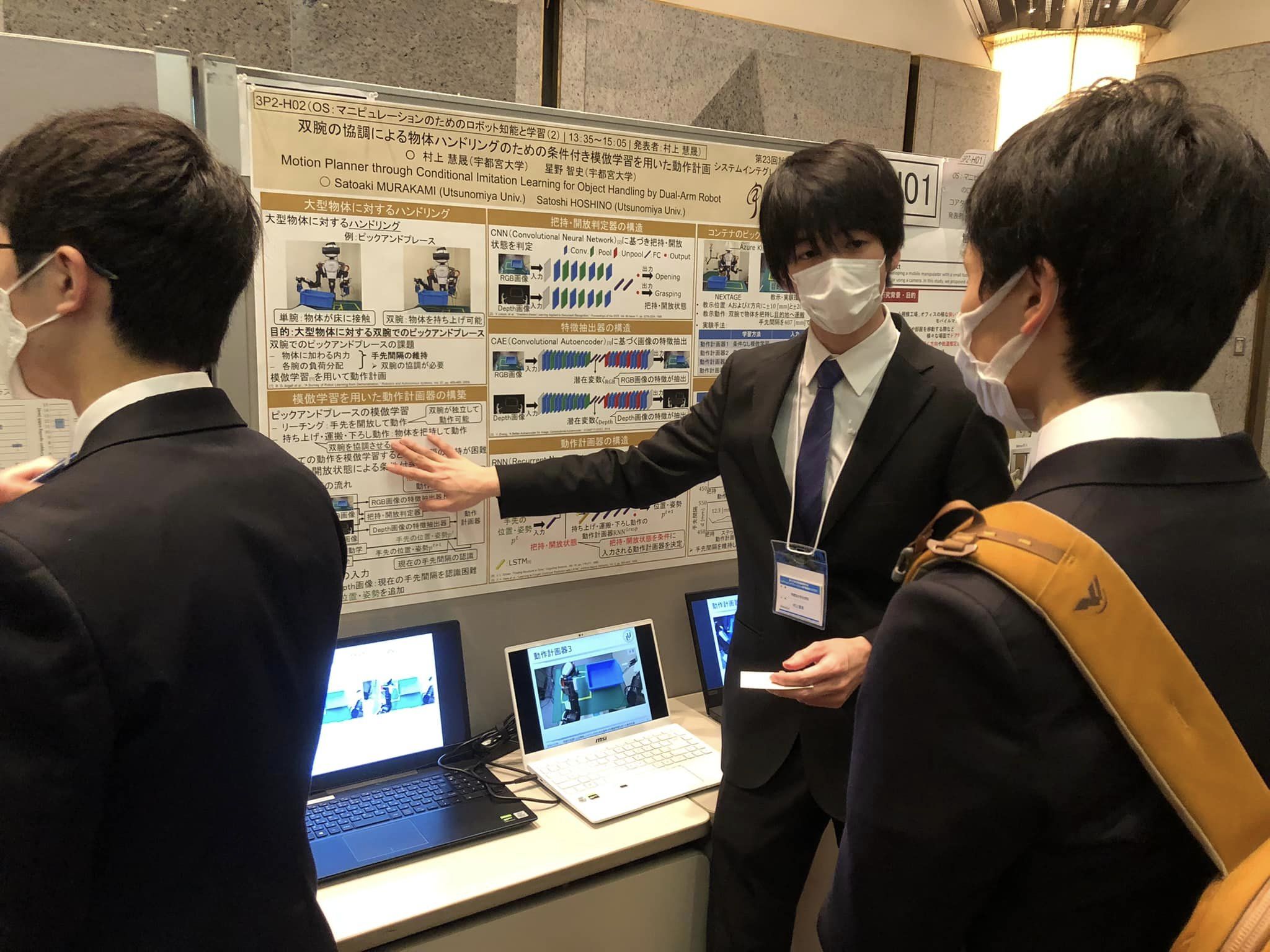
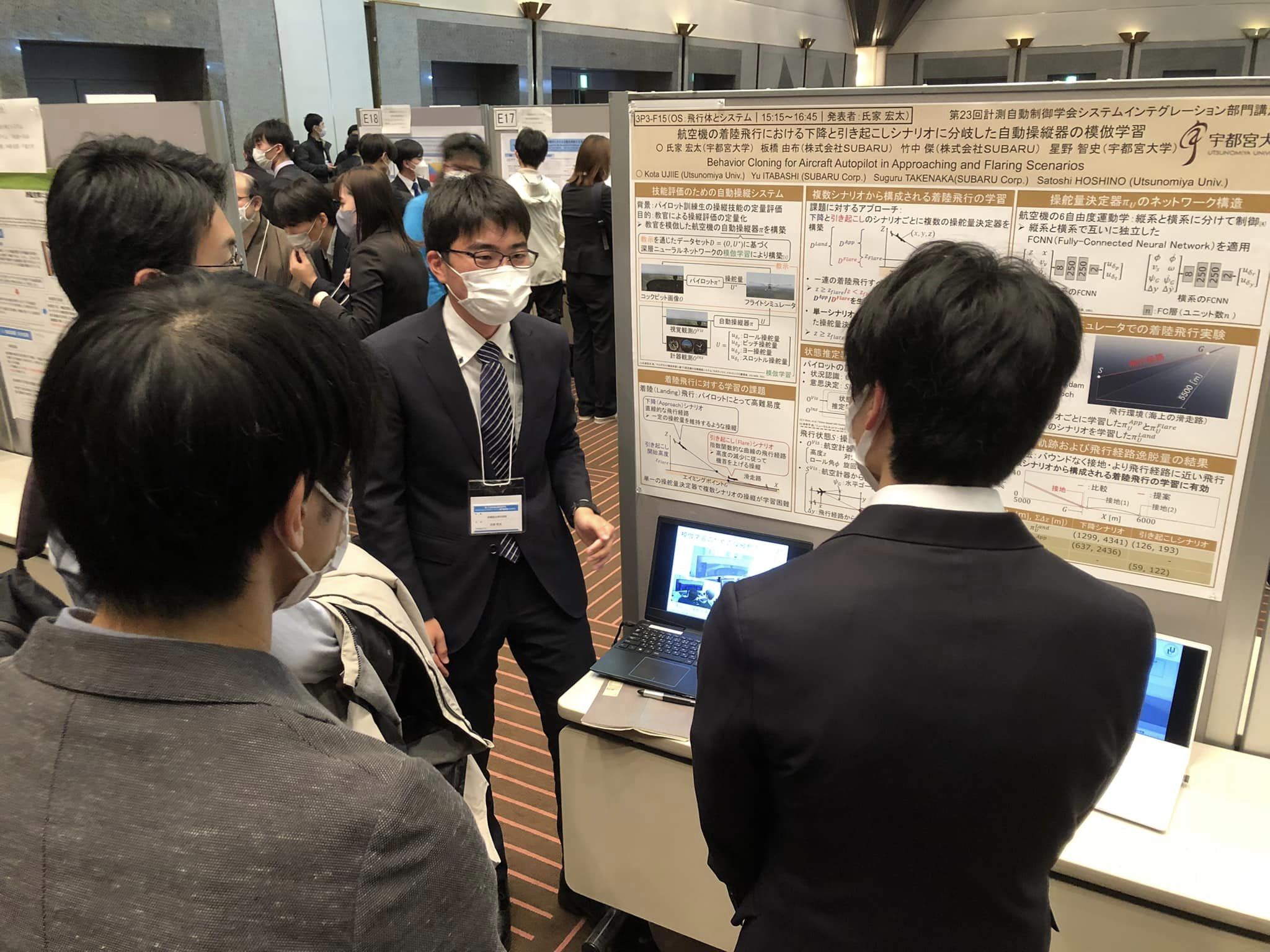
第23回計測自動制御学会システムインテグレーション部門講演会にて,4名が研究発表を行いました.発表題目は,「移動ロボットによる障害物回避のためのLiDAR遠近画像を用いた動作計画」(鵜沼恭平, 星野智史, pp. 249~253),「基盤地図とオンラインSLAMによる移動ロボットの自己位置推定のための地図点群処理」(栗原佑太, 星野智史, pp. 1176~1181),「双腕の協調による物体ハンドリングのための条件付き模倣学習を用いた動作計画」(村上慧晟, 星野智史, pp. 2817~2822),「航空機の着陸飛行における下降と引き起こしシナリオに分岐した自動操縦器の模倣学習」(氏家宏太, 板橋由布, 竹中傑, 星野智史, pp. 3248~3252)です.
左から氏家君,栗原君,村上君,鵜沼君
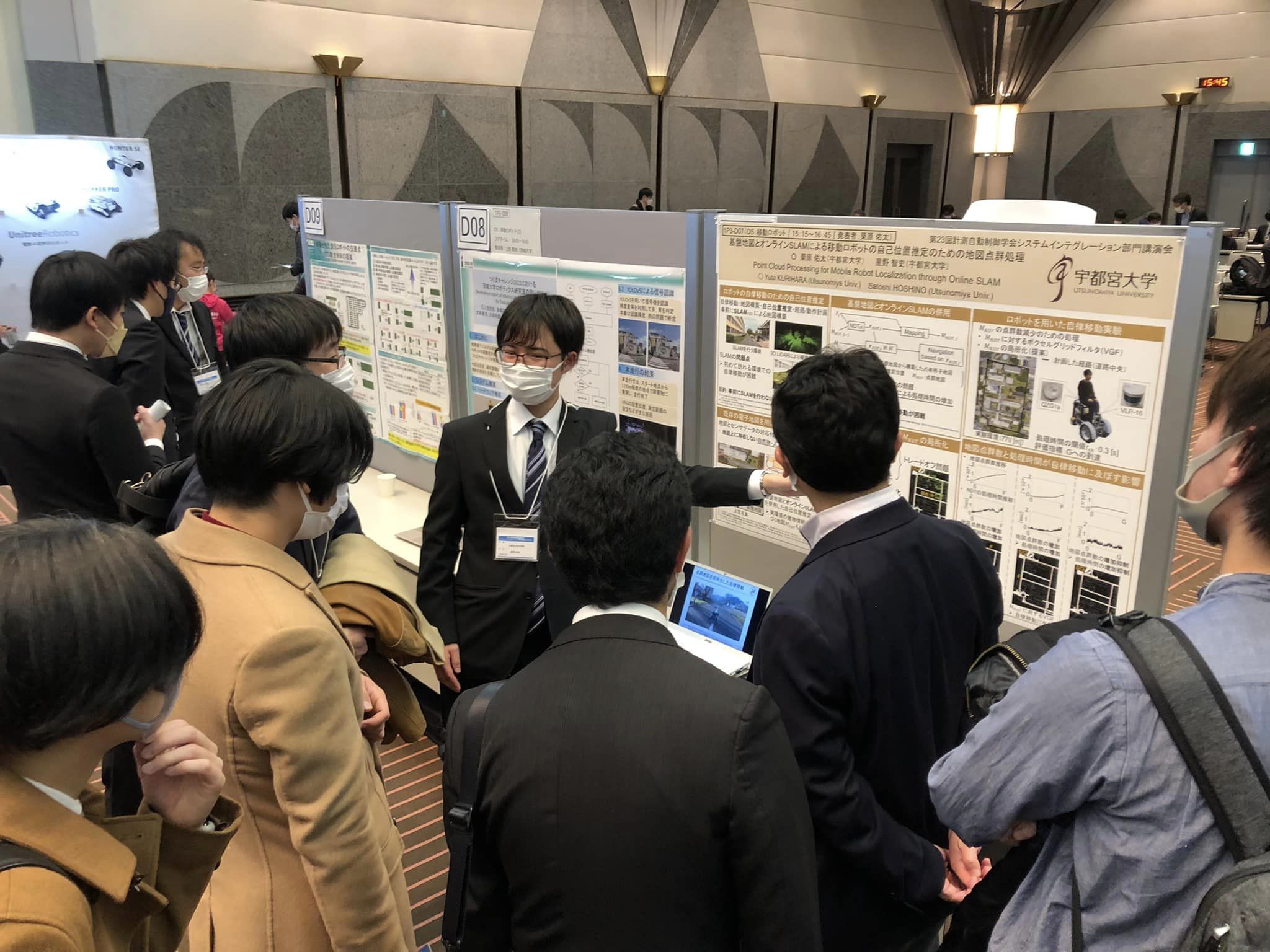
| 鵜沼君 | 栗原君 |
| 村上君 | 氏家君 |
2022/12/4
「女子高校生のための工学講座」が本学の工学部で開講され,3名の女子高生が「知能ロボットのプログラミングと制御」を受講してくれました.3時間の内容でしたが,3名ともがんばって取り組み,全員がロボットによるライントレースの実験まで成功しました!皆さん,大変お疲れ様でした.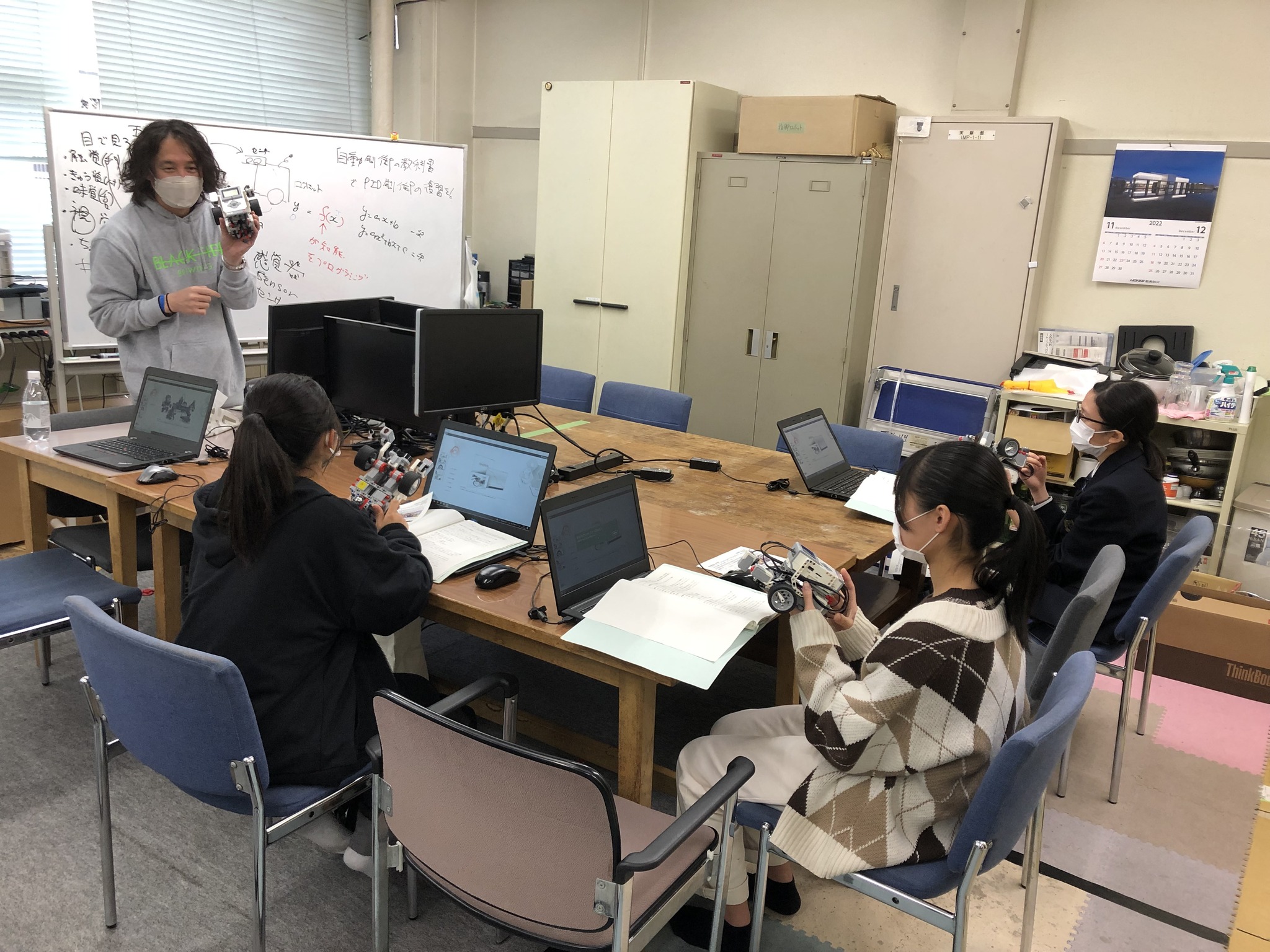


2022/11/26
当研究室4年生の山田君が,中央大学で開催された2022年度 先端ロボット工学合同ワークショップにて研究発表を行いました.今年は30回目の節目だったようで,大隅先生と梅田先生のご尽力のおかげで対面で開催されました.当研究室からは7期生の田上君以来,3年ぶりの参加となりました.皆さん,大変お疲れ様でした.


2022/10/14
The 54th ISCIE International Symposium on Stochastic Systems Theory and Its Applications (SSS '22)にて,M2の栗原君がオンラインで研究発表を行いました.当研究室からは,初めて学生が国際会議で発表をしました!発表題目は「Online SLAM with Modifications for Mobile Robot Localization」(Y. Kurihara and S. Hoshino, ISCIE International Symposium on Stochastic Systems Theory and Its Applications, pp. 41-42)です.
2022/9/8
SICE2022にて,星野がオンラインで研究発表を行いました.発表題目は「Motion Planner Based on CNN with LSTM through Mediated Perception」(S. Hoshino and Y. Yoshida, Proceedings of the SICE Annual Conference 2022, pp. 622-627)です.
2022/9/6~8
日本ロボット学会 第40回 学術講演会にて,M2の鵜沼君と若狭君が研究発表を行いました.発表題目は,「移動ロボットによる障害物回避のためのLiDAR俯瞰画像を用いた動作計画」(鵜沼恭平, 星野智史, RSJ2022AC2I2-05)と「複数台警備ロボットによる訪問者の向きを考慮した領域分割法」(若狭直哉, 星野智史, RSJ2022AC4D1-05)です.



 久しぶりの対面発表@東京大学
久しぶりの対面発表@東京大学
2022/8/20
M2の栗原君との共著の論文が,Journal of Robotics and MechatronicsのVol. 34,No. 4,pp. 867~876に掲載されました(doi: 10.20965/jrm.2022.p0867).論文タイトルは「Mobile Robot Localization Through Online SLAM with Modifications」です.国土地理院の電子地図を使って自己位置推定をする際,測量データに誤りがあるとその影響を受けてしまうので,同時にオンラインでSLAMをしながら,その位置・姿勢情報を使って自己位置を修正する手法を提案しています.提案手法によって,本学キャンパス内を一周させても,ほぼ道路上に自己位置を推定できるようになりました.
2022/6/30
日本ロボット学会誌のVol. 40,No. 5,pp. 445~448(https://doi.org/10.7210/jrsj.40.445)に論文が掲載されました.論文タイトルは「BMIを介したパーソナルモビリティロボットの操作支援」です.田上君おめでとう!
2022/6/14~16
クロアチアのザグレブにて開催された17th International Conference on Intelligent Autonomous Systems (IAS-17)にて,星野がオンラインでの研究発表を行いました.7期生及川君との共著です.発表題目は「Reaching Motion Planning with Vision-Based Deep Neural Networks for Dual Arm Robots」(S. Hoshino and R. Oikawa, International Conference on Intelligent Autonomous Systems, pp. 455-469)です.
2022/6/2~3
ロボティクス・メカトロニクス講演会2022にてM1の久保田君ががオンラインでの研究発表を行いました.発表題目は,「移動ロボットの動作計画のための深度差分画像を用いたCNNによる障害物状態推定」(久保田有羽, 鵜沼恭平, 星野智史, pp. 2A2-K04)です.
2022/4/4
2022年度のスタートです.当研究室に4年生が5名配属され,13名の体制となりました.
2022/3/28
日本ロボット学会誌のVol. 40,No. 2,pp. 162~165(https://doi.org/10.7210/jrsj.40.162)に論文が掲載されました.論文タイトルは「中間知覚とLSTMによるロボットの動的障害物回避動作計画」です.6期生の吉田遊友との共著で,「物体検出画像と深度画像を用いたCNNによる移動ロボットのEnd-to-End動作計画」の続編となります.プレゼン動画はこちらからご視聴いただけます.
2022/3/25
研究室の7期生5名が大学院修士課程を修了しました.おめでとうございます.
 及川良太
及川良太
小林亮
斉藤成信
齋藤陽都
田上拓弥
2022/3/24
日本機械学会関東学生会第61回学生員卒業研究発表講演会にて4年生1名が研究発表(オンライン)を行いました.発表題目は,久保田有羽「CNNに深度差分画像を用いた障害物の動き状態推定と移動ロボットによる動作計画」です.
2022/3/23
M2の小林亮君が令和3年度宇都宮大学学生表彰をいただきました.
2022/3/6
この4月には新4年生が研究室に配属されます.研究室の記念すべき10期生となります!ということで,10期生へのウェルカムメッセージと,1~9期生の名前の入った動画を作ってみました.
2022/2/20
6期生の八木君との研究成果がJournal of Robotics and MechatronicsのVol. 34,No. 1,pp. 111~120に論文として掲載されました(doi: 10.20965/jrm.2022.p0111).論文タイトルは「Mobile Robot Localization Using Map Based on Cadastral Data for Autonomous Navigation」です.事前にSLAMによる地図生成が不要なロボットの自己位置推定に焦点をあて,SLAMの代わりに,国土地理院の測量データから地図を作成します.自己位置推定はMCLで行います.その際,測量データには道路や建物の情報はあるのですが,街路樹のような自然物や,看板や自販機のような人工物の情報がないため,地図と現実との所謂マップマッチングの解決に注力しました.
2022/2/15
令和3年度⼯農総合科学専攻機械知能⼯学プログラム修士論文発表会にて,当研究室の大学院博士前期課程2年生5名が発表を行いました.
2022/2/15
M2の田上君がパーソナルモビリティロボットを脳波で操縦するための自身の研究を動画にしてくれました.後半では県庁で行った自動運転のデモンストレーションもご覧になれます.5期生の神田君,6期生の八木君,そして7期生の田上君,5年かけてようやく研究の基礎ができあがったような気がします.この研究がどう発展するか,乞うご期待!
2022/2/10
令和3年度機械システム工学科卒業研究発表会にて,当研究室の4年生4名が発表を行いました.お疲れ様でした.
2022/1/24
第22回計測自動制御学会システムインテグレーション部門講演会より,M2の小林亮君と星野がSICE SI2021優秀講演賞をいただきました.
2022/1/10~12
SII 2022がオンラインで開催されました.星野が研究発表を行いました.発表題目は「Discrete Motion Planner based on Deep Recurrent Neural Network for Mobile Robot Obstacle Avoidance in Dead-End Environments」(S. Hoshino and J. Sumiyoshi, The IEEE/SICE International Symposium on System Integration, pp. 979-984)です.
2021/12/24
研究内容のページを大幅にリニューアルしました.当研究室に興味のある方は,研究室紹介の動画に加え,こちらにも目を通しておいてください.
2021/12/15~17
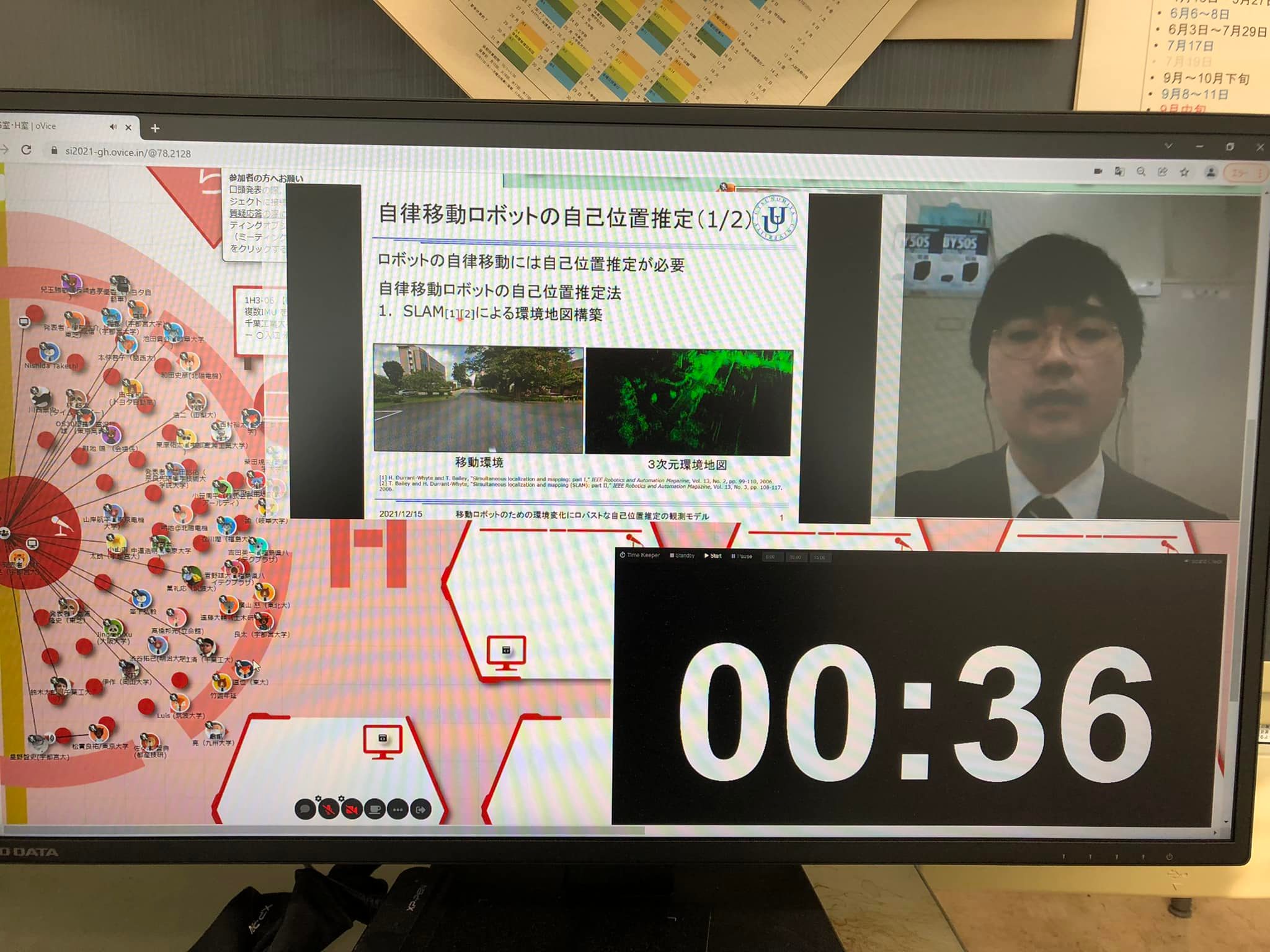
第22回計測自動制御学会システムインテグレーション部門講演会(オンライン)にて,5名が研究発表を行いました.発表題目は,「インスタンスセグメンテーションを用いた複数物体へのリーチング」(及川良太, 星野智史, pp. 474~479),「移動ロボットのための環境変化にロバストな自己位置推定の観測モデル」(小林亮, 星野智史, pp. 975~980),「電子地図に基づくオンライン SLAM の歪み修正による移動ロボットの自己位置推定法」(栗原佑太, 星野智史, pp. 1089~1094),「見張機と探索機による協調的な上空監視システムにおける進入機に対する包囲戦略」(斉藤成信, 星野智史, pp. 1219~1224),「警備ロボットによる空間変化検出に向けたルールベースのアルゴリズムと深層学習に基づく背景差分法の比較」(齋藤陽都, 星野智史, pp. 1364~1369)です.

左:左から齋藤ハルト君,及川君,小林君,斉藤シゲミチ君,栗原君
小林君のみ口頭発表,他4名はインタラクティブ(ポスター)発表でした.
右:M2の田上君とB4の久保田君も加わりロボット学会と忘年会を兼ねてのお食事会
| 及川君 | 小林君 |
| 栗原君 | 斉藤シゲミチ君 |
| 齋藤ハルト君 |
2021/9/9~11
日本ロボット学会 第39回 学術講演会(オンライン開催)にて,M2の学生2名と星野が研究発表を行いました.発表題目は,「移動ロボットのための環境変化にロバストな自己位置推定法」(小林亮, 星野智史, RSJ2021AC1H2-05),「中間知覚とLSTMによるロボットの動的障害物回避動作計画」(星野智史, 吉田遊友, RSJ2021AC2I4-05),「BMIを介したパーソナルモビリティロボットの操作支援」(田上拓弥, 星野智史, RSJ2021AC2I4-06)です.

 小林君(左)と田上君(右)
小林君(左)と田上君(右)
星野のプレゼン動画
2021/9/8
SICE2021にて,星野が研究発表を行いました.発表題目は「Imitation Learning based on Data Augmentation for Robotic Reaching」(S. Hoshino, T. Hisada, and R. Oikawa, Proceedings of the SICE Annual Conference 2021, pp. 392-399)です.
2021/9/1
研究室紹介の動画を作りました.
2021/6/23
オンライン開催となったIAS-16にて,パドヴァ大学のグロリア・ベラルド氏が研究発表を行いました.発表題目は「Shared Autonomy for Telepresence Robots based on People-Aware Navigation」(G. Beraldo, K. Koide, A. Cesta, S. Hoshino, J. Miura, M. Salvà, and E. Menegatti, International Conference on Intelligent Autonomous Systems)です.
2021/6/22
日本ロボット学会誌のVol. 39,No. 5,pp. 475~478(https://doi.org/10.7210/jrsj.39.475)とpp. 479~482(https://doi.org/10.7210/jrsj.39.479)に論文が掲載されました.論文タイトルは「警備ロボットによる全方位カメラを用いた差分画像からの空間変化検出」と「物体検出画像と深度画像を用いたCNNによる移動ロボットのEnd-to-End動作計画」です.齋藤君,吉田君おめでとう!
2021/6/7~8
ロボティクス・メカトロニクス講演会2021にてM1の4名がオンラインでの研究発表を行いました.発表題目は,「ティーチングプレイバックシステムにおける双腕の協調を考慮した大型物体のハンドリング」(村上慧晟, 久田智己, 及川良太, 星野智史, pp. 1A1-A03),「マルチタスク学習による移動ロボットのEnd-to-End 動作計画」(鵜沼恭平, 吉田遊友, 星野智史, pp. 1A1-E15),「基盤地図とオンラインSLAMによる移動ロボットの自己位置推定法」(栗原佑太, 八木秀明, 小林亮, 星野智史, pp. 1A1-G01),「マルチタスク模倣学習に基づく航空機の自動操縦システム」(氏家宏太, 板橋由布, 大崎洋介, 池田光司, 袋瀬健, 星野智史, pp. 2P1-B09)です.
左から鵜沼君,氏家君,栗原君,村上君
2021/6/1~4
オンライン開催されたDARS-SWARM2021にて,星野が研究発表を行いました.発表題目は「Multiple Cooperative Searchers for Aerial Surveillance」(S. Hoshino and K. Kikuchi, The 4th International Symposium on Swarm Behavior and Bio-Inspired Robotics, pp. 264-276)です.
2021/5/6
日本ロボット学会誌のVol. 39,No. 3,pp. 275~278に論文が掲載されました(doi: https://doi.org/10.7210/jrsj.39.275).論文タイトルは「測量地図情報に基づく移動ロボットの自己位置推定法」です.研究室初の学生が筆頭著者の論文です!八木君,おめでとう.
2021/4/6
2021年度のスタートです.当研究室に4年生が4名配属され,さらに大学院からも2名が新たに加わり,総勢16名の体制となりました.
2021/3/24
研究室の6期生5名が大学院修士課程を修了しました.おめでとうございます.
2021/3/10
日本機械学会関東学生会第60回学生員卒業研究発表講演会にて4年生5名が研究発表(オンライン)を行いました.発表題目は,氏家宏太「飛行の教示から模倣学習を通じた航空機の自動操縦システム」,鵜沼恭平「移動ロボットのEnd-to-End動作計画に向けたDNNとCNNの障害物回避に対する汎化性能の比較」,栗原佑太「基盤地図とオンラインSLAMを併用した移動ロボットの自己位置推定法」,村上慧晟「双腕型ロボットによる物体ハンドリングのためのティーチングプレイバックシステム」,吉田尊貴「Brain-Machine Interfaceでパーソナルモビリティを操縦するためのイメージ分類」です.
2021/1/11~14
SII 2021がオンラインで開催されました.星野が2件の研究発表を行いました.発表題目は「Brain-Mobility-Interface Based on Deep Learning Techniques for Classifying EEG Signals into Control Commands」(S. Hoshino, T. Tagami, H. Yagi, and K. Kanda, The IEEE/SICE International Symposium on System Integration, pp. 150-156)と「Teach and Playback for Robotic Handling through Object Recognition」(S. Hoshino and K. Urayama, The IEEE/SICE International Symposium on System Integration, pp. 582-583)です.
2021/2/10
令和2年度⼯農総合科学専攻機械知能⼯学プログラム修士論文発表会にて,当研究室の大学院博士前期課程2年生5名が発表を行いました.
2021/2/9
令和2年度機械システム工学科卒業研究発表会にて,当研究室の4年生5名が発表を行いました.お疲れ様でした.
2021/1/13
本学工学部のHPにて,人工知能に関する研究内容(「ディープラーニングに基づく双腕型ロボットによる物体ハンドリング」と「パーソナルモビリティを脳波で操縦するためのBrain-Machine-Interface」)が紹介されました.詳細はAI in USE !をご覧ください.
2020/12/21

コロナ禍でのオンライン忘年会.今年は研究室のOBにも参加してもらい,業界の話なども聞け大変有意義(真面目)な交流会となりました.来年は対面でお酒を交えての忘年会ができることを願ってます.
2020/12/16~18
第21回計測自動制御学会システムインテグレーション部門講演会(オンライン)にて,3名が研究発表を行いました.発表題目は,「探索機の寄与度を考慮した見張機と探索機による協調的な上空監視システム」(斉藤成信, 菊池航矢, 板橋直亮, 椛山智貴, 河野充, 星野智史, pp. 1235~1240),「マルチエージェントUAVによる監視飛行行動の強化学習」(菊池航矢, 斉藤成信, 板橋直亮, 椛山智貴, 河野充, 星野智史, pp. 1241~1246),「ロボットのリーチングに関するRNNに基づいたEnd-to-End 動作計画のための模倣学習」(久田智己, 及川良太, 星野智史, pp. 2660~2665)
左から久田君,斉藤君,菊池君
2020/10/9~11
日本ロボット学会 第38回 学術講演会(オンライン開催)にて,M2とM1の学生5名が研究発表を行いました.発表題目は,「複数台の警備ロボットによる訪問者を対象とした環境の領域分割」(藤澤郁也, 星野智史, RSJ2020AC2B2-04),「警備ロボットによる全方位カメラを用いた差分画像からの空間変化検出」(齋藤陽都, 星野智史, RSJ2020AC2D2-04),「測量地図情報に基づく移動ロボットの自己位置推定法」(八木秀明, 星野智史, RSJ2020AC2F2-01),「物体検出画像と深度画像を用いたCNNによる移動ロボットのEnd-to-End動作計画」(吉田遊友, 星野智史, RSJ2020AC3A3-05),「複数物体に対する双腕での同時リーチングのためのCNNに基づくEnd-to-End学習」(及川良太, 久田智己, 星野智史, RSJ2020AC3B1-02)です.


左:藤澤君(左)と八木君(右)
中:齋藤君
右:吉田君(左)と及川君(右)
2020/9/25
SICE2020にて,星野が研究発表を行いました.発表題目は「Aerial Surveillance System with Multiple Agents for Moving Targets」(S. Hoshino, T. Katsumoto, S. Saitoh, N. Itabashi, T. Kabayama, and M. Kono, Proceedings of the SICE Annual Conference 2020, pp. 427-432)と「Comparison of End-to-End Continuous and Discrete Motion Planners for Autonomous Mobile Robots」(S. Hoshino J. Sumiyoshi, Proceedings of the SICE Annual Conference 2020, pp. 433-438)です.
2020/6/22
Journal of Advanced Computational Intelligence and Intelligent InformaticsのVol. 24,No. 3,pp. 346~356に論文が掲載されました(doi: 10.20965/jaciii.2020.p0346).論文タイトルは「Robot Vision System for Human Detection and Action Recognition」です.
2020/5/28~29
ロボティクス・メカトロニクス講演会2020にてM1の5名が研究のオンラインでのポスター発表を行いました.発表題目は, 「見張機と探索機による協調的な上空監視システムの提案」(斉藤成信, 菊池航矢, 板橋直亮, 椛山智貴, 河野充, 星野智史, pp. 2A1-B08), 「Brain-Mobility-Interface のための深層学習に基づいた脳波信号の制御指令分類」(田上拓弥, 神田康之介, 八木秀明, 星野智史, pp. 2A1-C06), 「セマンティックセグメンテーションを用いたCNNによる複数物体へのリーチング動作」(及川良太, 久田智己, 浦山一樹, 宮下隼輔, 星野智史, pp. 2A1-M04), 「移動ロボットのためのLiDARデータの遮蔽にロバストな自己位置推定法」(小林亮, 吉田遊友, 住吉丈一郎, 星野智史, pp. 2P1-K05), 「警備ロボットのためのRGBカメラによる差分画像からの空間変化検出」(齋藤陽都, 伊藤雅基, 藤澤郁也, 星野智史, pp. 2P1-N02)です.
2020/4/6
2020年度のスタートです.当研究室に4年生が5名配属され,さらに大学院からも1名が新たに加わり,総勢16名の体制となりました.
2020/4/1
科研費基盤研究(C)に採択されました!
2020/3/24
研究室の5期生6名が大学院修士課程を修了しました.おめでとうございます.
2020/3/24
M2の住吉君が令和元年度宇都宮大学成績優秀者表彰をいただきました.
2020/3/17
M2の吉田亮太君が令和元年度宇都宮大学学生表彰をいただきました.
2020/3/16
新型コロナウイルスの影響により,日本機械学会関東学生会第59回学生員卒業研究発表講演会は中止となってしまいました.
2020/2/13
令和元年度機械知能工学専攻修士論文発表会にて,当研究室の大学院博士前期課程2年生6名が発表を行いました.すばらしい発表でした.
2020/2/6
令和元年度機械システム工学科卒業研究発表会にて,当研究室の4年生5名が発表を行いました.お疲れ様でした.
2020/1/27
第20回計測自動制御学会システムインテグレーション部門講演会より,吉田亮太君と星野がSICE SI2019優秀講演賞をいただきました.
2020/1/12~15
アメリカ合衆国はホノルルにて開催されたで開催されたSII 2020にて,星野が研究発表を行いました.発表題目は「End-to-End Discrete Motion Planner based on Deep Neural Network for Autonomous Mobile Robots」(S. Hoshino and J. Sumiyoshi, The IEEE/SICE International Symposium on System Integration, pp. 12-17)です.
2019/12/12~14
第20回システムインテグレーション部門講演会にて,M2の学生5名が研究発表を行いました.発表題目は,「人の注視点情報を考慮した欠損物体に対する画像認識」(吉田亮太, 星野智史, pp. 383~388),「自律移動ロボットのための傾斜路面環境における3次元地図構築」(神田康之介, 星野智史, pp. 167~172),「ロボットによる物体把持のための位置・姿勢推定に基づいた教示動作の再生」(浦山一樹, 宮下隼輔, 柿木泰成, 尾崎功一, 星野智史, pp. 978~983),「自律移動ロボットのためのEnd-to-End動作計画法の回帰と識別問題に対する性能比較」(住吉丈一郎, 星野智史, pp. 1087~1092),「双腕型ロボットのための頭部カメラを用いたVR操作システム」(宮下隼輔, 浦山一樹, 久田智己, 柿木泰成, 尾崎功一, 星野智史, pp. 1337~1342)です.

左から浦山君,吉田(亮)君,神田君,宮下君,住吉君
2019/12/20~22
沖縄科学技術大学院大学 OISTで開催されたSWARM 2019にて,星野が研究発表を行いました.発表題目は「Global Path for Covering Tasks Performed by Swarming Chloroplastic Robots」(S. Hoshino and S. Tezuka, The 3rd International Symposium on Swarm Behavior and Bio-Inspired Robotics, pp. 36-39)です.
2019/12/8
当研究室4年生の田上君が,筑波大学で開催された2019年度 先端ロボット工学合同ワークショップにて研究発表を行いました.お疲れ様でした.
2019/9/3~6
日本ロボット学会 第37回 学術講演会にて,M2とM1の学生2名,さらに星野が計4件研究発表を行いました.発表題目は,「オプティカルフローに基づく移動ロボットの人物検出と動作認識」(星野智史, 新村恭平, RSJ2019AC1L2-05),「自律移動ロボットによるDRNNに基づいた時系列な離散動作のEnd-to-End学習」(住吉丈一郎, 星野智史, RSJ2019AC3B1-01),「自律移動ロボットによる離散的な動作のEnd-to-End学習」(住吉丈一郎, 星野智史, RSJ2019AC3B1-02),「CNNに基づく人の教示に対するリーチング動作のEnd-to-End学習」(久田智己, 浦山一樹, 宮下隼輔, 柿木泰成, 尾崎功一, 星野智史, RSJ2019AC3B2-03)です.
久田君(左)と住吉君(右)
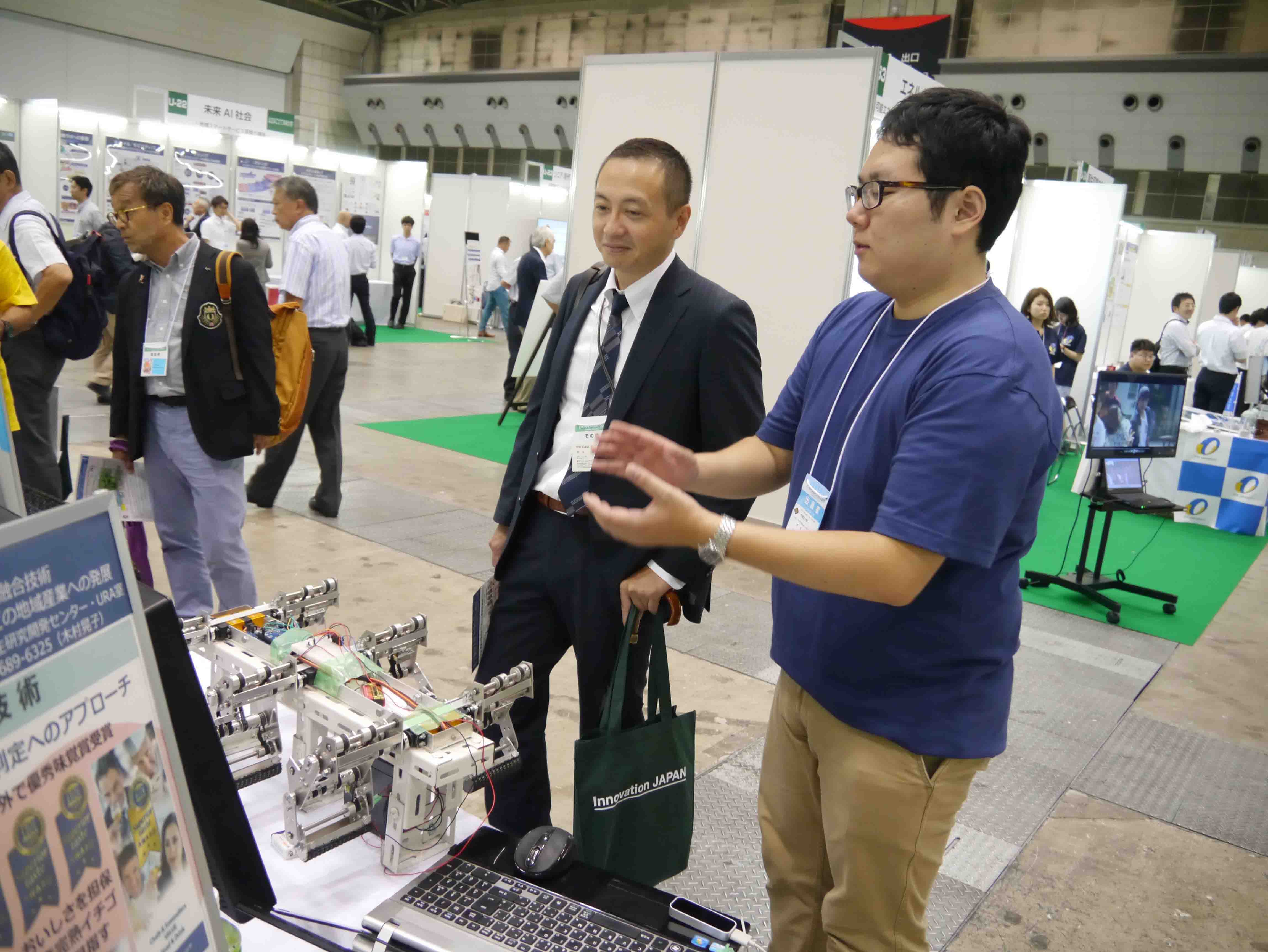
2019/8/29~30
イノベーション・ジャパン2019にて,本学のモビリティの社会実装についての展示・説明を行いました.当研究室からはM2とB4の2名が参加いたしました.

2019/8/21
Journal of Robotics and MechatronicsのVol. 31,No. 4,pp. 535~545に論文が掲載されました(doi: 10.20965/jrm.2019.p0535).論文タイトルは「Dynamic Partitioning Strategies for Multi-Robot Patrolling Systems」です.
2019/7/20
Journal of Advanced Computational Intelligence and Intelligent InformaticsのVol. 23,No. 4,pp. 735~742に論文が掲載されました(doi: 10.20965/jaciii.2019.p0735).論文タイトルは「Optical Flow for Real-Time Human Detection and Action Recognition Based on CNN Classifiers」です.
2019/7/16
栃木県,県内企業,宇大の産官学共同で外装を試作し,それを装着したパーソナルモビリティロボット(imus)のお披露目が栃木県庁昭和館前にて行われました.当日の様子が下野新聞や日経新聞に掲載されました.WEB版はこちら(下野)やこちら(日経)でご覧になれます.また,写真や動画もご覧になれます.
2019/7/15
2019年夏のオープンキャンパスが開催されました.今年も多くの方々に研究室を見学していただきました.どうもありがとうございました.
 (屋外)
(屋外) 
 (1階実験室)
(1階実験室)

 (4階廊下)
(4階廊下)  (宇~太)
(宇~太)
2019/7/11
当研究室のパーソナルモビリティロボットに関する記事が下野新聞に掲載されました.WEB版はこちら.
2019/6/6~7
ロボティクス・メカトロニクス講演会2019にてM1の4名が研究のポスター発表を行いました.発表題目は, 「強化学習を用いた無人航空機の監視行動に関する研究」(菊池航矢, 勝本健史, 板橋直亮, 椛山智貴, 河野充, 星野智史, pp. 1P1-M06), 「CNNに基づくロボットのリーチング動作に関する End-to-End 学習」(久田智己, 浦山一樹, 宮下隼輔, 柿木泰成, 尾崎功一, 星野智史, pp. 1P2-C01), 「地理情報システムを用いた移動ロボットの自己位置推定の提案」(八木秀明, 神田康之介, 星野智史, pp. 1A1-F08), 「RGB-D画像を用いた End-to-End 学習による移動ロボットの動作計画法」(吉田遊友, 住吉丈一郎, 星野智史, pp. 2A2-B14)です.

左から菊池君,八木君,久田君,吉田(遊)君
2019/4/25
日本機械学会論文集の85巻872号,p. 18-00353 に論文が掲載されました(DOI:10.1299/transjsme.18-0035).論文タイトルは「遮蔽領域における障害物をも考慮した移動ロボットの動作計画法」です.
2019/4/4
2019年度のスタートです.当研究室に4年生が5名配属され,さらに大学院からも1名が新たに加わり,総勢16名の体制となりました.
2019/4/1
当研究室の名称を分散知能システム工学研究室から「知能ロボット・システム工学研究室」に変更しました.
2019/3/26
M1の伊藤君と住吉君が工学部長・工学研究科長より表彰されました.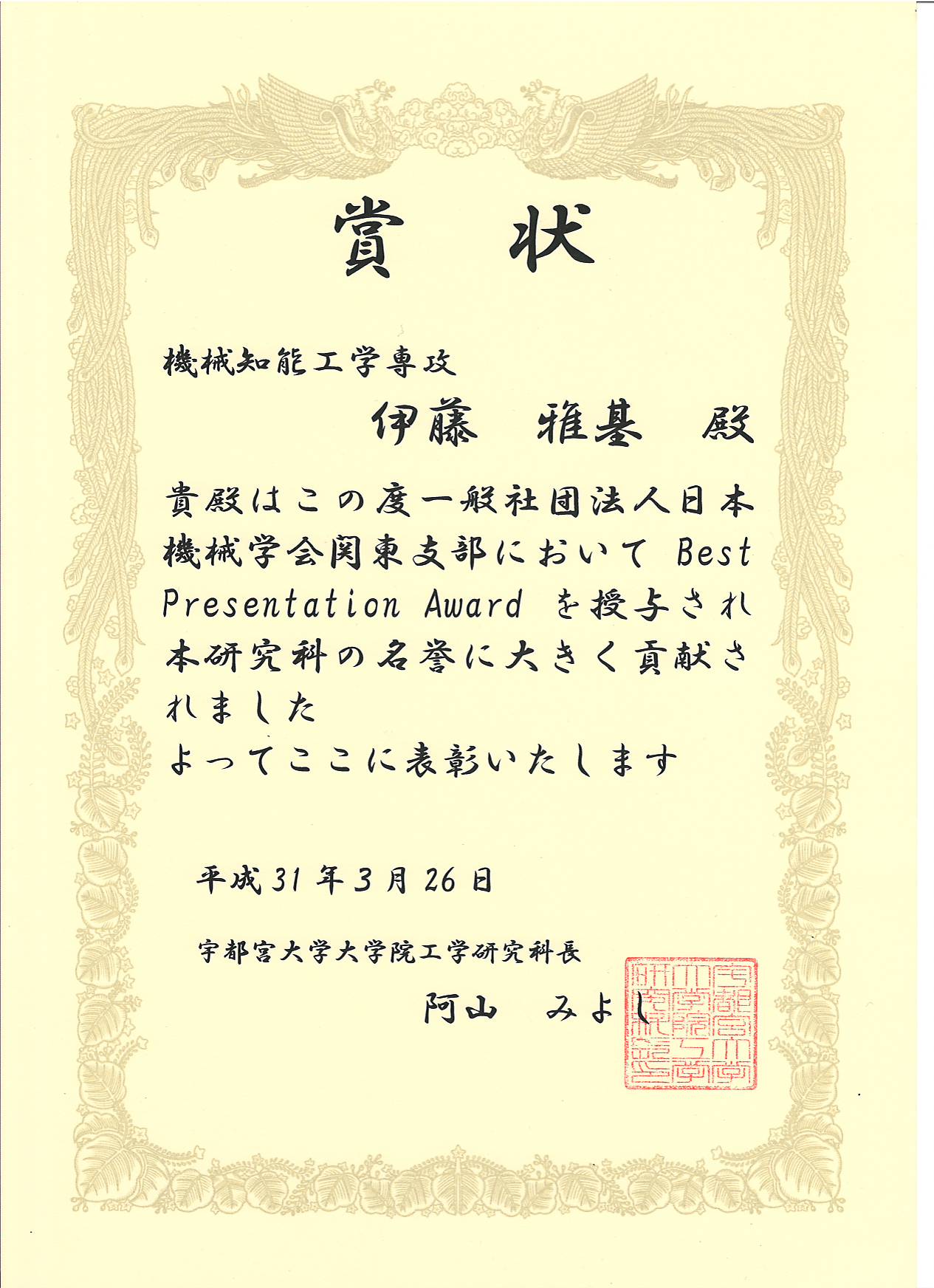 (伊藤君)
(伊藤君)  (住吉君)
(住吉君)
2019/3/25
3月25日に本学REALで開催されたとちぎロボットフォーラムの内容が日経新聞(地域経済面)に掲載されました.WEB版はこちら.
2019/3/22
研究室の4期生6名が大学院修士課程を修了しました.おめでとうございます.
2019/3/20
研究業績のページを新設しました.
2019/3/18
日本機械学会関東学生会第58回学生員卒業研究発表講演会にて4年生5名が研究発表を行いました.発表題目は,菊池航矢「無人航空機による監視飛行行動の強化学習」,久田智己「CNNに基づいたビジュアルフィードバックによるロボットのリーチング動作」,八木秀明「地理情報システムを介した移動ロボットの自己位置推定」,吉田遊友「RGB-D画像を用いた自律移動ロボットのEnd-to-End動作学習」です.

左から菊池君,久田君,吉田,八木君


Best Presentation Awardを受賞した吉田君(左)と八木君(右)
2019/2/13
平成30年度機械知能工学専攻修士論文発表会にて,当研究室の大学院博士前期課程2年生6名が発表を行いました.すばらしい発表でした.
2019/2/6
平成30年度機械システム工学科卒業研究発表会にて,当研究室の4年生5名が発表を行いました.お疲れ様でした.
2019/1/24
第31回自律分散システム・シンポジウムにて,M2の勝本君が研究発表を行いました.発表題目は,「移動する監視対象の経路予測に基づいたUAVによる上空監視システム」(勝本健史, 板橋直亮, 椛山智貴, 河野充, 星野智史, 1B3-3)です.
2018/12/13~15
マレーシアはクアラルンプールにて開催されたROBIO 2018にて,星野が研究発表を行いました.発表題目は「Robotic Patrolling Systems based on Hidden Markov Model for Moving Visitors」(S. Hoshino and J. Chiba, Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics, pp. 2190-2195)です.
2018/12/7
イタリアに来てからの初仕事,Department of Information Engineeringのセミナーにて,我々の研究に関するプレゼンテーションをさせていただきました.



2018/12/1
2018年12月1日~2019年2月1日の期間,イタリアはパドヴァ大学に研究留学しています.Emanuele Menegatti先生のIntelligent Autonomous Systems Laboratoryラボに受けれていただきました.
2018/10/15
平成29年度前期開講の「生産システム工学」に関して,星野が第15回宇都宮大学ベストレクチャー賞をいただきました.今回で3度目の受賞のため,ベストレクチャーの殿堂入りだそうです.詳細についてはこちらをご覧ください.
2018/10/10
5年ぶりにリンクのページを加筆しました.「交流のある先生の研究室」に先生方の研究室のリンクを貼らせていただきました.
2018/9/5~7
日本ロボット学会 第36回 学術講演会にて,M2とM1の学生3名が研究発表を行いました.発表題目は,「深層強化学習を用いた多指脚ロボットの動作獲得」(市川怜志, 高木航平, 星野智史, RSJ2018AC1E2-02),「教示時とは異なる位置の物体に対して視覚情報を用いた双腕型ロボットによる把持動作の再生」(浦山一樹, 宮下隼輔, 久田智己, 柿木泰成, 尾崎功一, 星野智史, RSJ2018AC1G3-03),「葉緑体ロボット群による環境被覆に向けた大域的経路生成」(手塚翔太, 星野智史, RSJ2018AC1K3-05)です.
左から浦山君,市川君,手塚君
2018/8/28
とちぎロボットフォーラムでの取り組みが,28日付の日経新聞(地域経済面)にも掲載されました.WEB版はこちら.
2018/8/27
とちぎロボットフォーラムが本学ボティクス・工農技術研究所(REAL)にて開催され,星野がREALでのパーソナルモビリティに関するプロジェクトの説明をさせていただきました.また,当日の内容が,28日の下野新聞11面に掲載されました.WEB版はこちら.
2018/7/16
2018年夏のオープンキャンパスが開催されました.200名以上の方に研究室を見学していただきました.どうもありがとうございました.
 (とにかく暑い!)
(とにかく暑い!)  (パーソナルモビリティ)
(パーソナルモビリティ)
 (1階実験室)
(1階実験室)  (4階:移動ロボットの自律ナビゲーション)
(4階:移動ロボットの自律ナビゲーション)
2018/7/5
日本機械学会関東支部ニュースレターのメカトップ関東(日本機械学会誌「メカトップ関東」第122巻 第1196号付録 8ページ)にて,星野の執筆記事が掲載されました.「知能ロボット技術の実用化に向けて」です.
2018/6/20
Journal of Robotics and MechatronicsのVol. 30,No. 3,pp. 485~492に論文が掲載されました(doi: 10.20965/jrm.2018.p0485).論文タイトルは「Motion Planning of Mobile Robots for Occluded Obstacles」です.
2018/6/12
ドイツはバーデンバーデンにて開催されたIAS-15にて,星野が研究発表を行いました.発表題目は「Robot Vision System for Real-Time Human Detection and Action Recognition」(S. Hoshino and K. Niimura, International Conference on Intelligent Autonomous Systems, pp. 507-519)です.

2018/6/4~5
ロボティクス・メカトロニクス講演会2018にてM1の3名(伊藤君,浦山君,住吉君)が研究のポスター発表を行いました.発表題目は, 「分散型ロボットシステムの巡視に向けた領域分割手法」(伊藤雅基, 星野智史, 千葉潤一郎, 高橋和希, pp. 1P1-E14), 「双腕型ロボットに対するティーチングプレイバックシステム」(浦山一樹, 星野智史, 新村恭平, 柿木泰成, 尾崎功一, pp. 2A1-G14), 「深層学習を用いた自律移動ロボットの動作計画法」(住吉丈一郎, 星野智史, 内田憲一郎, 芳川知樹, pp. 2A2-D14)です.
左から伊藤君,浦山君,住吉君
2018/4/5
2018年度のスタートです.当研究室に4年生が5名配属され,さらに大学院からも二人が移籍して来てくれたため,総勢17名の新たな体制となりました.昨年度よりさらに厚みを増しました.
2018/4/1
科研費基盤研究(C)の3年目です!また,研究分担者としての課題も採択されました.
2018/3/28
平成29年度は当研究室の多くの学生が表彰されました. (伊藤君)
(伊藤君)  (住吉君)
(住吉君)  (新村君)
(新村君)  (市川君)
(市川君)  (千葉君)
(千葉君)
2018/3/23
研究室の3期生5名が大学院修士課程を修了しました.おめでとうございます.これで最初の3世代が全員卒業です.いつでも気軽に遊びに来てください.
2018/3/17
第44回ファジィ・ワークショップにて大学院2年生の田村君が研究発表を行いました.発表題目は「パーソナルモビリティの操作インタフェースの開発」(田村貴生, 神田康之介, 尾崎功一, 星野智史, pp. 37~38)です.尾崎研とのコラボで初めての成果です.

2018/3/16
日本機械学会関東学生会第57回学生員卒業研究発表講演会にて4年生4名が研究発表を行いました.発表題目は,伊藤雅基「分散型ロボットシステムの巡視に向けた領域分割」,浦山一樹「双腕型ロボットのためのティーチング・プレイバクシスム」,神田康之介「キャスタの抵抗を考慮したパーソナルモビリティロボット走行制御」,住吉丈一郎「深層学習による自律移動ロボットの作計画法の提案」です.

左から伊藤君,浦山君,神田君,住吉君

Best Presentation Awardを受賞した伊藤君(左)と住吉君(右)
2018/3/15
2018年度精密工学会春季大会学術講演会にて大学院2年生の阿部智紀君が研究発表を行いました.発表題目は「CPG制御器に基づいた多脚型ロボットの歩行パターン生成」(阿部智紀, 星野智史, pp. 843~844)です.

2018/3/1
本学における平成29年度CDI非常勤研究員・ヤングイノベーションスカラーシップ研究成果報告会にて,大学院2年生の阿部智紀君がポスター発表を行いました.発表題目は「指の伸展・屈曲動作に基づいた脚機構を有するロボット「指脚(シキャク)」の開発と制御」です.
2018/2/14
平成29年度機械知能工学専攻修士論文発表会.当研究室の大学院博士前期課程2年生5名が発表を行いました.大変お疲れ様でした.
2018/2/10
第18回 計測自動制御学会システムインテグレーション部門講演会より,新村君と星野がSICE SI2017優秀講演賞をいただきました.
2018/2/8
平成29年度機械システム工学科卒業研究発表会.当研究室の4年生4名が発表を行いました.お疲れ様でした.
2018/1/10
創立120周年記念「日本機械学会 最近10年のあゆみ」に,星野の執筆記事が掲載されました.18.交通・物流部門の14ページ以降「18.7 荷役運搬機械」をご覧ください.
2017/12/29
本学大学院機械知能工学専攻博士前期課程1年次中間発表会が行われ,当研究室6名のM1が研究発表を行いました.お疲れ様でした.この日はOBが来てくれ大忘年会が行われました.


左:発表を聞く研究室の面々
右:大忘年会
2017/12/20~22
第18回システムインテグレーション部門講演会にて,M1の学生2名が研究発表を行いました.発表題目は,「オプティカルフローをCNNへ用いることによる人物検出と動作認識」(新村恭平, 星野智史, pp. 1920~1925)と「HMMによる訪問者の目的地推定に基づいたロボット警備システムの提案」(千葉潤一郎, 高橋和希, 星野智史, pp. 3432~3437)です.
左:新村君
右:千葉君
2017/11/11
当研究室4年生の住吉君が,青山学院大学で開催された2017年度 先端ロボット工学合同ワークショップにて研究発表を行いました.お疲れ様でした.


ド緊張しながらの発表
2017/11/10
研究内容のページを更新しました.
2017/11/3
2017年秋のオープンキャンパスが開催されました.見学に来ていただいた皆様,どうもありがとうございました.

パーソナルモビリティロボットの試乗体験@陽東キャンパス10号館前
2017/10/15
知能と情報(日本知能情報ファジィ学会誌)のVol. 29,No. 5,pp. 655~659に論文が掲載されました(doi: 10.3156/jsoft.29.5_655).論文タイトルは「ファジィ推論による小型滑空ロボットの自律飛行」です.卒業生である渡邊君と山城君の研究が実を結びました!
2017/9/27
平成28年度前期開講の「生産システム工学」に関して,星野が第14回宇都宮大学ベストレクチャー賞をいただきました.
2017/9/25
公益社団法人 自動車技術会 自動車制御とモデル研究専門委員会にて,星野が講演をしました.講演題目は「車輪型自律移動ロボットを用いたサービスロボティクス」です.
2017/9/20
機械システム工学演習の発表会が行われました.当研究室からは,4名の4年生が卒業研究の中間発表を行いました.お疲れ様でした.
2017/9/19~22
SICE2017にて,星野が研究発表を行いました.発表題目は「Interactive Formation by Multiple Mobile Robots for Guiding Humans」(S. Hoshino, T. Tamura, and Y. Hayakawa, Proceedings of the SICE Annual Conference 2017, pp. 327-333)です.
2017/9/12~14
日本ロボット学会 第35回 学術講演会にて,星野とM2の学生2名が研究発表を行いました.発表題目は,星野「移動ロボットによる効率的な警備に向けた巡視意思決定手法」(RSJ2017AC3B1-06),内田「混雑環境を考慮した移動ロボットの動作計画法」(RSJ2017AC1G3-02),芳川「動的障害物のオクルージョンにおける情報の不確かさを考慮した移動ロボットの動作計画法」(RSJ2017AC3B1-04)です.

内田君(左)と芳川君(右)
2017/9/4
2017年7月に参加した日独若手専門家交流ドイツ研修旅行の報告書が掲載されました.こちらのPDFの5ページです.乱筆乱文のほどお許しください.
2017/8/31~9/1
イノベーション・ジャパン2017にて,本学の工農融合ロボティクスの取り組みについての展示・説明を行いました.当研究室からはM2とB4の2名が参加いたしました.

左:M2の阿部君
右:B4の神田君
2017/8/2
とちぎロボットフォーラムが本学陽東キャンパスにて開催され,パーソナルモビリティロボットのデモをさせていただきました.当日の様子が下野新聞のデジタル版にて動画とともにご覧になれます.
2017/7/22
東京のビッグサイトで開催された夢ナビライブ2017にて,本学および機械工学・ロボット工学の説明をしてまいりました.一人でも多くの高校生が宇都宮大学のロボティクスに興味を持っていただけたら幸いです.
2017/7/20
Journal of Advanced Computational Intelligence and Intelligent InformaticsのVol. 21,No. 4,pp. 667~674に論文が掲載されました(doi: 10.20965/jaciii.2017.p0667).論文タイトルは「Interactive Motion Planning for Mobile Robot Navigation in Dynamic Environments」です.
2017/7/18
Junior Experts Exchange Program 2017(日独若手専門家交流)に参加し,ドイツのロボティクスに関する研究機関を訪問して来ました.今年のテーマは「サービスロボティクス」でした.ベルリン日独センターの方々からは,終始きめ細かなご支援を賜りました.感謝申し上げます.
![]() (ドイツ料理とケルン地ビール)
(ドイツ料理とケルン地ビール) ![]() (ケルン大聖堂前にて)
(ケルン大聖堂前にて) ![]() (KITのヒューマノイド)
(KITのヒューマノイド) ![]() (ドイツの郷土料理とワインを堪能)
(ドイツの郷土料理とワインを堪能) ![]() (フェニックスデザイン)
(フェニックスデザイン) ![]() (ドイツビール飲み比べ)
(ドイツビール飲み比べ) ![]()
![]() (DLRのロボット)
(DLRのロボット) ![]() (ミュンヘン工科大のロボット)
(ミュンヘン工科大のロボット)
2017/7/17
2017年夏のオープンキャンパスが開催されました.見学に来ていただいた皆様,どうもありがとうございました.
![]() (移動ロボットの自律ナビゲーション)
(移動ロボットの自律ナビゲーション) ![]() (全方向移動ロボットの操作)
(全方向移動ロボットの操作) ![]()
![]() (指脚ロボットへの動作教示)
(指脚ロボットへの動作教示)![]() (円陣w)
(円陣w)
2017/6/20
Journal of Robotics and MechatronicsのVol. 29,No. 3,pp. 602~612に論文が掲載されました(doi: 10.20965/jrm.2017.p0602).論文タイトルは「Swarm Robotic Systems Based on Collective Behavior of Chloroplasts」です.
2017/5/11
ロボティクス・メカトロニクス講演会2017にてM1の4名が研究のポスター発表を行いました.発表題目は,市川「連想記憶に基づいた多指脚ロボットの歩行動作獲得」,勝本「ベイズ推定に基づいた無人飛行ロボットによる上空監視システム」,千葉「隠れマルコフモデルを用いた進入者の目的地推定と移動ロボットによる警備」,手塚「光源運動による葉緑体ロボット群の外的制御」です.大勢の方に聞いていただき,大変有意義な発表となりました.

左から勝本君,千葉君,市川君,手塚君
2017/3/24
研究室の2期生が大学院修士課程を修了しました.おめでとうございます.皆さんのがんばりのおかげで研究室も大変盛り上がりました.君たちの社会での活躍を期待してます!またいつでも研究室に遊びに来てくださいね.
2017/3/17
第43回ファジィ・ワークショップにて大学院2年生の渡邊君が研究発表を行いました.発表題目は「ファジィ推論による小型滑空ロボットの自律受動飛行」です.

2017/3/16
日本機械学会関東学生会第56回学生員卒業研究発表講演会にて4年生5名が研究発表を行いました.発表題目は,市川「模倣による多指脚ロボットの歩行動作獲得」,勝本「ベイズ推定に基づいたUAVによる上空監視システム」,千葉「HMMを用いた進入者の目的地推定とロボットによる警備」,手塚「光源を用いた葉緑体ロボット群に対する外的制御手法の提案」,新村「オプティカルフローをCNNに用いた人物検出と動作認」です.
![]() (発表を終えて)
(発表を終えて)![]() (Best Presentation Awardを受賞した千葉君(左)と市川君(右))
(Best Presentation Awardを受賞した千葉君(左)と市川君(右))
2017/2/28
立石科学技術振興財団から研究助成(A)をいただくことが決定しました.
2017/2/13
当研究室の4年生5名が卒業研究の発表を行いました.お疲れ様でした.男オンリーで迎えたバレンタインデーは,なかなか興味深かったです.
![]()
![]()
2017/2/10
当研究室の大学院博士前期課程2年生4名が修士論文の発表行いました.大変お疲れ様でした.
2017/1/31
計測自動制御学会 第29回 自律分散システム・シンポジウムにて大学院2年生の滝沢君,1年生の高橋君,田村君が研究発表を行いました.発表題目は,滝沢「葉緑体の群行動に基づくロボット群による協調動作および被覆作業への応用」,高橋「複数台ロボットによる訪問者警備に向けた領域分割手法の提案」,田村「人との相互作用を考慮したロボット群による誘導隊列」です.![]()
2016/12/28
本学大学院機械知能工学専攻博士前期課程1年次中間発表会が行われ,当研究室5名のM1が研究発表を行いました.お疲れ様でした.![]() (打ち上げ兼忘年会♪)
(打ち上げ兼忘年会♪)
2016/11/5
当研究室4年生の新村君が,横国大で開催された2016年度 先端ロボット工学合同ワークショップにて研究発表を行いました.お疲れ様でした.![]()
2016/10/11
IROS 2016にて研究発表を行いました.発表題目は「Adaptive Patrolling by Mobile Robot for Changing Visitor Trends」です.![]() (DCC)
(DCC) ![]() (セッションルーム)
(セッションルーム)![]() (大入り)
(大入り)![]() (バンクエット)
(バンクエット)
2016/9/16
機械システム工学演習(4年生)の発表会が行われました.当研究室からは,5名の4年生が卒業研究の中間発表を行いました.お疲れ様でした.
2016/9/7~9
日本ロボット学会 第34回 学術講演会にて星野が研究発表を行いました.発表題目は「警備ロボットによる進入者の傾向変化に対する即応ベイズ学習」と「ベイズ学習と価値反復法に基づいた警備ロボットの最適巡視」です.
2016/7/18
2016年夏のオープンキャンパスが開催されました.見学に来ていただいた皆様,お忙しい中どうもありがとうございました.
![]() (拙者の模擬授業)
(拙者の模擬授業) ![]() (滑空ロボットの説明)
(滑空ロボットの説明) ![]() (自律走行の説明)
(自律走行の説明) ![]() (指脚ロボット)
(指脚ロボット)![]() (全方向移動ロボットの操作)
(全方向移動ロボットの操作)
2016/6/15
Advanced Roboticsに論文が採択されました!論文タイトルは「Optimal Patrolling Methodology of Mobile Robot for Unknown Visitors」です.
2016/4/12
2016年度のスタートです.当研究室にも4年生が5名配属され,総勢15名の新たな体制となりました.
2016/4/1
科研費基盤研究(C)が採択されました.
2016/3/24
研究室の1期生が大学院修士課程を修了しました.おめでとうございます.君たちの社会での活躍を期待してますよ!またいつでも研究室に遊びに来てくださいね.
2016/2/9
当研究室の4年生5名が卒業研究の発表を行いました.お疲れ様でした.![]() (阿部)
(阿部) ![]() (内田)
(内田) ![]() (高橋)
(高橋) ![]() (田村)
(田村) ![]() (芳川)
(芳川)
2016/2/4
当研究室の大学院博士前期課程2年生4名が修士論文の発表行いました.3年以上の長きに亘り,大変お疲れ様でした.![]() (石渡)
(石渡) ![]() (岩崎)
(岩崎) ![]() (牧)
(牧) ![]() (山城)
(山城)
2016/1/8
![]()
平成26年度前期開講の「生産システム工学」に関して,星野が第12回宇都宮大学ベストレクチャー賞をいただきました.
2015/11/21
当研究室4年生の高橋君が,東洋大で開催された2015年度 先端ロボット工学合同ワークショップにて研究発表を行いました.お疲れ様でした.![]() (会場の様子)
(会場の様子)![]() (緊張の発表)
(緊張の発表)
2015/9/29
IROS 2015にて研究発表を行いました.発表題目は「Patrolling Robot Based on Bayesian Learning for Multiple Intruders」と「Probabilistic Surveillance by Mobile Robot for Unknown Intruders」です.さすがIROS,どれも最高級クオリティーの研究ばかりで,とても良い刺激と勉強になりました.![]() (Congress Center Hamburg)
(Congress Center Hamburg) ![]() (セッションルーム)
(セッションルーム)![]() (私のセッション)
(私のセッション) ![]() (バンクエット)
(バンクエット) ![]() (おつかれさまでした)
(おつかれさまでした)
2015/9/22
Advanced Roboticsに論文が掲載されました!論文タイトルは「Safe and efficient motion planning of multiple mobile robots based on artificial potential for human behavior and robot congestion」です.
2015/9/11
私の帰国に伴い,研究室の学生さんがお帰りなさい飲み会を催してくれました.どうもありがとうございます.![]() (あっという間になくなるという...)
(あっという間になくなるという...) ![]() (実験室飲み会1)
(実験室飲み会1)![]() (実験室飲み会2)
(実験室飲み会2) ![]() (実験室飲み会3)
(実験室飲み会3)
2015/9/3
日本ロボット学会 第33回 学術講演会にて大学院1年生の宇賀神君と星野が研究発表を行いました.発表題目は「ベイズ学習に基づいた知的警備ロボットによる侵入者巡視」と「不特定進入者に対するロボットの確率論的巡視アプローチの提案」です.![]() (ロボット学会会場となった東京電機大学)
(ロボット学会会場となった東京電機大学) ![]() (宇賀神君発表の様子)
(宇賀神君発表の様子)
2015/7/20
2015年夏のオープンキャンパスが開催されました.私はアメリカにいたため参加できなかったのですが,研究室の学生が一生懸命がんばってくれました.見学に来ていただいた皆様,お忙しい中どうもありがとうございました.
![]() (ロボットによる地図生成)
(ロボットによる地図生成) ![]() (自律走行の説明)
(自律走行の説明) ![]() (滑空ロボット)
(滑空ロボット) ![]() (指脚ロボット)
(指脚ロボット)![]() (プロジェクションマッピング)
(プロジェクションマッピング)
2015/2/12
当研究室の4年生4名が卒業研究の発表を行いました.お疲れ様でした.![]() (宇賀神)
(宇賀神) ![]() (滝沢)
(滝沢) ![]() (早川)
(早川) ![]() (渡邊)
(渡邊)
2015/2/10
研究室紹介のページを加筆・修正しました.
2014/11/5
韓国は大田(テジョン)で開催されたInternational Symposium on Distributed Autonomous Robotic Systems (DARS 2014)にて研究発表を行いました.発表題目は「Motion Planning of Multiple Mobile Robots based on Artificial Potential for Human Behavior and Robot Congestion」です.
2014/6/5
7月21日は本学のオープンキャンパスが開催されます.当研究室からも3つの催し物を準備しております.研究室配属や大学選びのため,是非とも遊びにいらしてください.星野は機械システム工学科の模擬授業(午後)も担当します.
2014/2/12
当研究室の4年生4名が卒業研究の発表を行いました.お疲れ様でした.![]() (石渡)
(石渡) ![]() (岩崎)
(岩崎) ![]() (牧)
(牧) ![]() (山城)
(山城)
2014/1/23
第26回自律分散システム・シンポジウムにて研究発表を行いました.発表題目は「人の動特性とロボットの混雑を考慮した人工ポテンシャル法の提案」です.
2013/11/25
![]()
当研究室4年生の牧君が,11月23日に中央大学で開催された2013年度 先端ロボット工学合同ワークショップにて優秀賞を受賞しました.おめでとうございます.
2013/10/02
日本ロボット学会 第31回 学術講演会にて研究発表を行いました.発表題目は「非均質な制御に基づいた移動ロボット群の小プラトゥーン走行」です.
2013/9/30
日本ロボット学会の学会誌(2013 Vol.31 No.7,第30回日本ロボット学会学術講演会論文特集号 I)に論文が掲載されました.論文題目は「異なる制御の移動ロボット群を考慮した小プラトゥーン走行 」です.人生初の単著論文です!
2013/8/30
学内にて以下の電子ジャーナルを閲覧することができます.各論文誌のサイトにて,"Current Issue"あるいは"Past Issues"から検索してみてください.
IEEE Transactions on Automation Science and Engineering ←私の論文はこちらに2本ほど掲載されています.
2013/6/27
オーストラリアはゴールドコーストで開催された8th IFAC Symposium on Intelligent Autonomous Vehiclesにて研究発表を行いました.発表題目は「Reactive Clustering Method for Platooning Autonomous Mobile Robots」です.
2013/6/5
Robotics and Autonomous Systems(2013 Vol. 61 No. 8)に論文が掲載れました.題目は「Multi-robot coordination for jams in congested systems」です.
2012/11/19
日本設計工学会の学会誌(2012 Vol. 47 No. 11)に解説記事が掲載されました.題目は「信頼性工学に基づいた群ロボットシステムに対する最適保全戦略」です.
2012/10/30
日本ロボット学会の学会誌(2012 Vol.30 No.8,第29回日本ロボット学会学術講演会論文特集号 II)に論文が掲載されました.論文題目は「適応的走行制御に基づいたロボット群の効果的な移動の実現 ―ロボットで混雑しボトルネックの存在する環境を想定して―」です.
2012/09/24
研究室ホームページを開設しました.
2012/09/17
日本ロボット学会 第30回記念 学術講演会にて研究発表を行いました.発表題目は「ロボット群がプラトゥーン走行するためのクラスタ構成法」です.
2012/09/01
東京工業大学資源化学研究所より,宇都宮大学大学院工学研究科機械知能工学専攻へ赴任してまいりました.