|
Research My research project aims to investigate automation technology as exhibited by the intelligent multi-robot system in industrial application based on software engineering. In collaboration with other companies, our team has focused on seaport container terminals and multiproduct manufacturing plants as the industrial application. Before that, in order for an autonomous robot to estimate its position accurately, we focused on a measurement method with a monocular camera as a robot vision sensor. In recent years, my major research topics are coordination of multiple mobile robots for congestion and fault-tolerant multi-robot systems considering maintenance. My research interest is to resolve the missing link between the robot and its environment in industrial automation: that is, how the interaction between a robot’s coordination system and its environmental system design ultimately leads to practical application of the intelligent multi-robot system. A number of methodologies are proposed herein for design and coordination/control, with practical problems used as constraints. Research Targets:
See the related papers listed in my Publications (English/Japanese) for more detail. Cruise Control of Robotic Vehicles
|
 |
 |
Key words: Multiple Mobile Robots, Congestion, Intelligent Cruise Control, Behavior Rule, Intelligent Transport System; Multi-Robot System, Fault Tolerance, Performance, Preventive and Corrective Maintenance, Reliability Engineering, Availability.
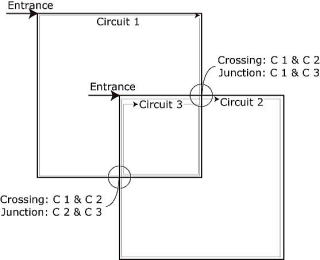
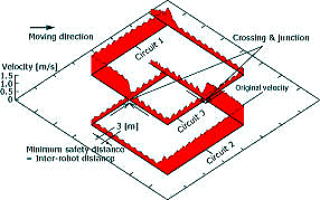
Multi-robot coordination methodology in congested systems with bottlenecks
In order for multiple mobile robots to solve congestion, a novel methodology that consists of two approaches, intelligent cruise control technique and behavior rule, is proposed through this research work.
In this work, first, our previously-proposed cruise control technique is improved. This enables robots to reduce velocity not only for the congestion preceding them, but also for the decelerating robot in front, using external interaction force generated among robots with a virtual damper. After that, a behavior rule in connection with the intelligent cruise control technique is designed and provided on congested lanes where robots slowly move. Thus, stronger interaction force affects the robots, and they move more slowly on the congested lanes.
In simulation experiments, the proposed methodology is compared to two other cruise control techniques. These are quantitatively evaluated on the basis of a criterion, i.e., behavioral feature, such as average velocity of all the robots and standard deviation of each velocity. Finally, the effectiveness of the methodology for solving the congestion is shown.
(See simulation movies: Circulating robots with our proposed two approaches or bang-bang control only)Cluster organization of autonomous mobile robots for small platoons
(Under review)
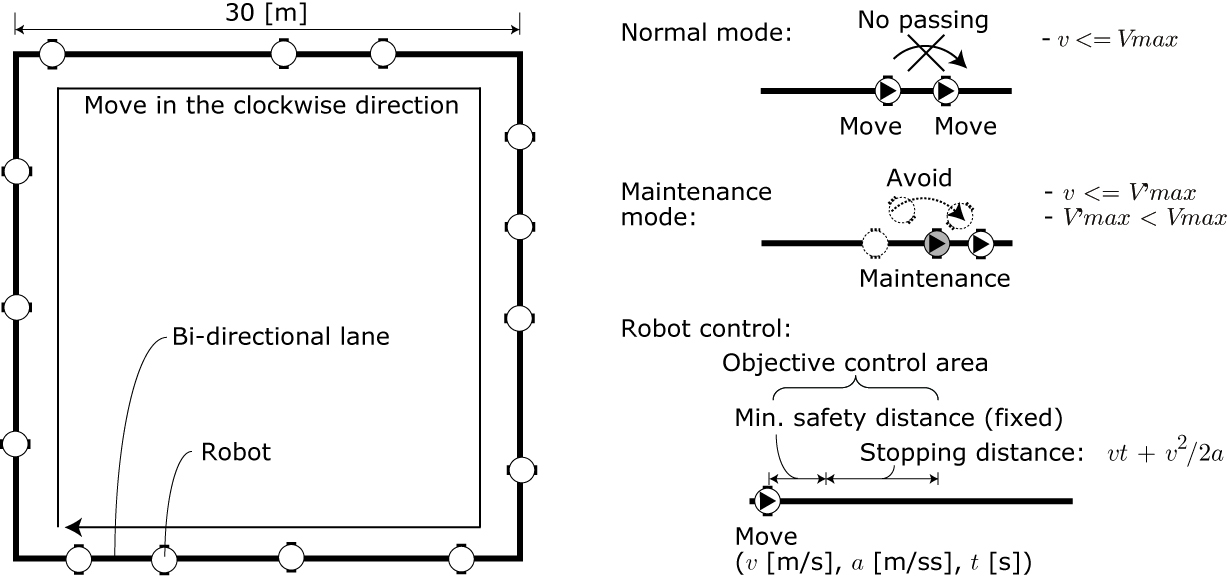
A system state is changed to congestion as the number of autonomous mobile robots is increased. Eventually, jams of robots are prone to be formed. Jams have a profound influence on robots’ behavior. Even in this state, therefore, robots are required to solve jams and move efficiently.
For this challenge, adaptive cruise control (ACC) suitable for a vehicle platoon is applied to robots. For the platooning robots based on ACC in congested systems with bottlenecks, a reactive clustering method using local information among adjacent robots is proposed. These robots are thus clustered into small platoons responding to a variety of changing circumstances.
Through simulation experiments, several scenarios in order for robots to organize clusters are compared and the effectiveness of the clustering method for the robot platooning in the system is evaluated. Furthermore, the superiority of the clustering method is shown in comparison to a previous robot
Fault-Tolerant Multi-Robot Systems
Key words: Multi-Robot Systems, Fault Tolerance, Optimal Maintenance, Preventiion, Correction, Reliability Engineering.
Optimal maintenance strategy for multiple mobile robots
This research focuses on the effectiveness of maintenance in fault-tolerant multi-robot systems. The multi-robot system is completely parallel. That is to say, the system is enabled to work as long as one robot works. For this system, it is required to ensure fault tolerance and keep high performance taking robot failure and maintenance, such as prevention and correction of robots, into account.
Therefore, we propose an optimal maintenance strategy on the basis of reliability engineering. This strategy enables robots to undergo preventive maintenance at an optimal interval and corrective maintenance each time they fail. Consequently, the number of robots undergoing maintenance or its effect on the system performance is minimized.
Through simulation experiments, the effectiveness of the optimal maintenance strategy for the higher system performance is shown. In addition, the influence of robots undergoing maintenance on the system performance is mathematically and experimentally discussed on the basis of the number of robots used and maintenance strategies.
(See simulation movies: Optimal maintenance, Non-optimal maintenance every 10000 [s] and 50000 [s])
Robotic Manufacturing Plants (This research was recently concluded)
|
|
|
Key words: Automated Robotic Manufacturing Systems, Multi-robot Coordination, Reactive Behavior, Congestion, Behavior Control, External Virtual Force, Fault Tolerance, Maintenance Activity, and Reliability Engineering.
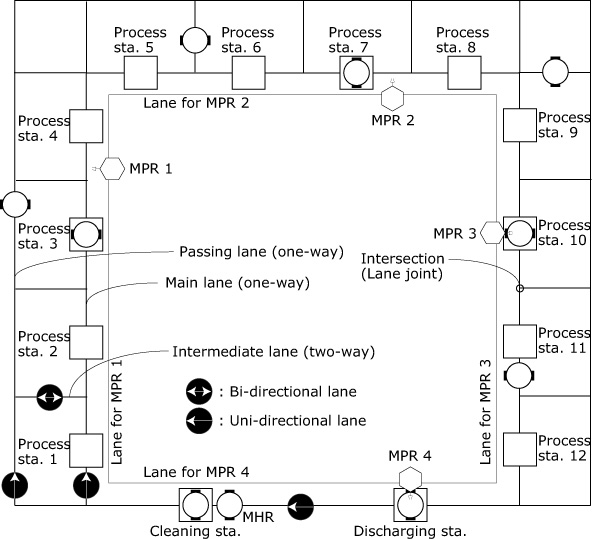
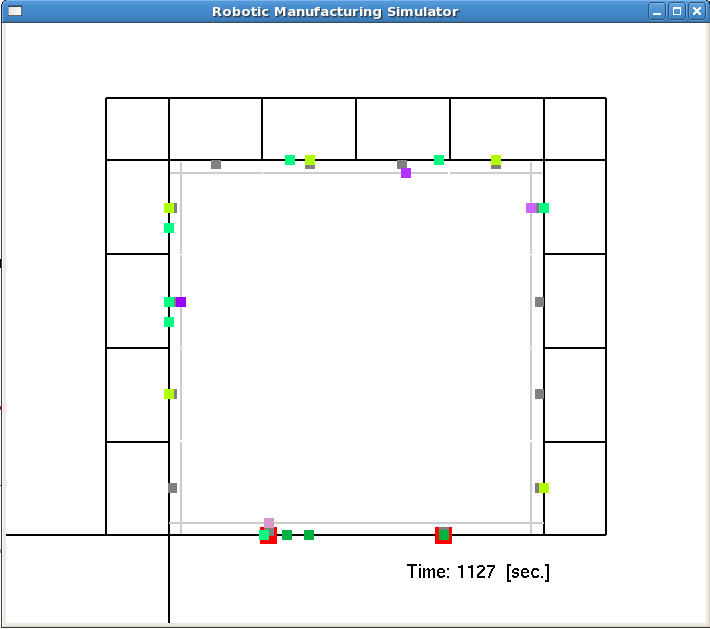
Multi-robot coordination for manufacturing operations
We focus on a batch manufacturing system with multiple industrial robots. In this system, material-handling robots (MHRs) and material-processing robots (MPRs) are operating. Inappropriate operations of these robots might cause a bottleneck. In addition, a bottleneck is a constraint that dominates the entire system performance, that is, the productivity. Therefore, for an efficient system, these robots have to operate appropriately while relating to each other. This is a challenge in this study.
For this challenge, we propose the following operational techniques: route planning approaches for the MHR and operation dispatching rules for the MPR on the basis of task-assignment to the robots that will reduce the effect of a bottleneck. Furthermore, reactive cooperation among the MPRs, so that the robots respond to a fluctuating heavy workload caused by the shifting bottleneck, is an essential operational technique.
(See a simulation movie: MOVIE)
Behavior control model of circulating robots for congestion
In this robotic manufacturing system, since material-handling robots (MHRs) transport materials to designated places, congestion is sometimes formed due to a localized bottleneck. This congestion dominates the system capacity. In other words, there is an event in which the congestion extends and the system throughput not only fails to increase but also may become worse, even if more robots are used to improve the productivity. This is a so-called bottleneck problem.
For this problem, we propose a behavior control method for the MHRs to eliminate or ease the congestion that arises from a bottleneck. Each MHR controls its own behavior adequately by using the external force of a virtual damper in order not to become involved in the congestion.
(See a simulation movie: MOVIE)
Fault-tolerant multi-robot operational strategies
In automated robotic systems, a robot undergoing the corrective maintenance (i.e., repair) or preventive maintenance (i.e., inspection) may become a disturbance of operations for other working robots. Therefore, the maintenance of a robot has to be performed adequately.
For this issue, we propose fault-tolerant multi-robot operational strategies focusing on the robot's behavior. A working robot, while switching the normal and fault-tolerant operational strategies reactively in a hybrid manner according to the presence or absence of a robot undergoing the maintenance, accomplishes a task. In addition, the maintenance activity for the robots is modeled on the basis of the reliability engineering and the reasonability of the corrective and preventive maintenances is demonstrated.
(See simulation movies: proposed hybrid strategies MOVIE and previous strategies MOVIE)
Seaport Container Terminals (2003 - 2008)
|
|
|
Key words: Container Transportation System, Design Methodology, Queuing Network Theory, Robot Operation, Bottleneck, Logic Tree, and System Balancing.
Optimal fleet sizing of AGVs and ATCs
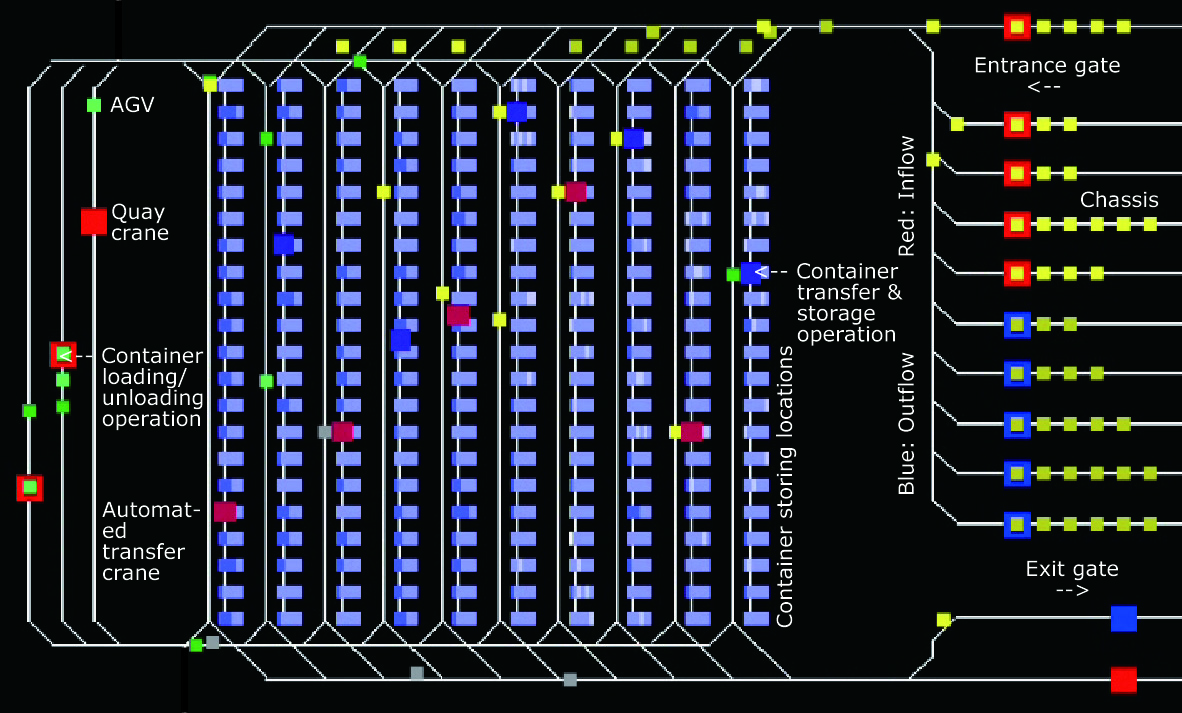
In this large-scaled seaport system, for practitioners, it is required to determine various kinds of design objectives, such as the number of lanes, buffers, and robots. As industrial robots in this system, Automated Guided Vehicles (AGVs) and Automated Transfer Cranes (ATCs) are operating. The numbers of these objectives have to be designed so that the designed system meets a given demand with the minimum cost. This is a combinatorial design problem.
For this purpose, we propose an optimal design methodology for the container transport system by using the queuing network theory. In the proposed methodology, the queuing network theory and a simulation-based optimization method are integrated to obtain the optimal design parameters.
(See a simulation movie: MOVIE)
Comparison, evaluation, and analysis of two container transport systems
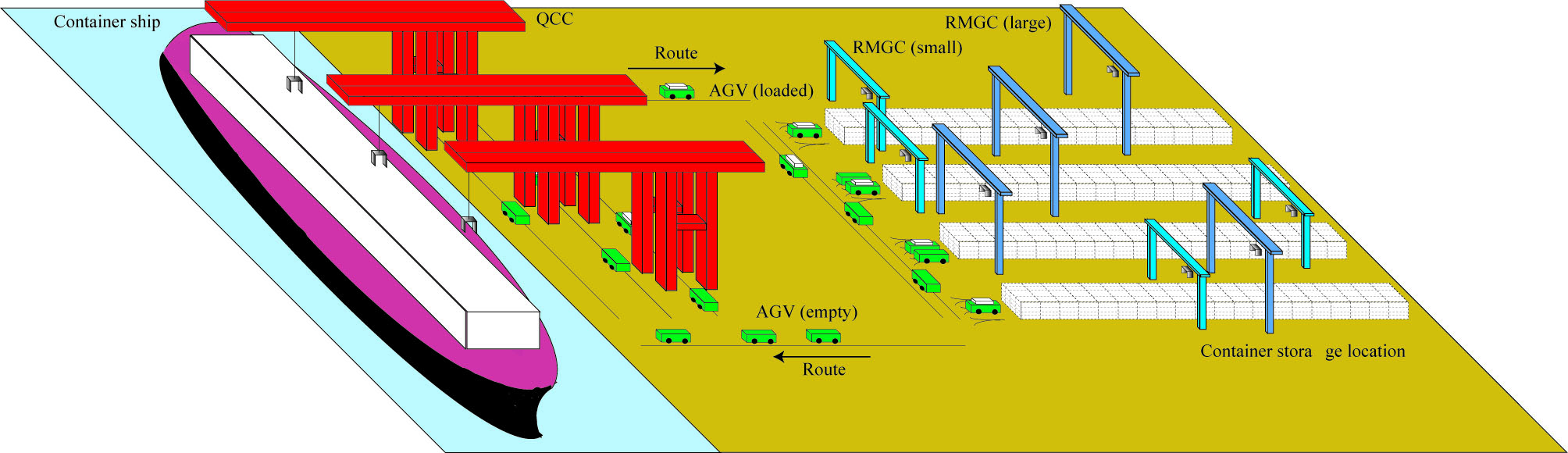
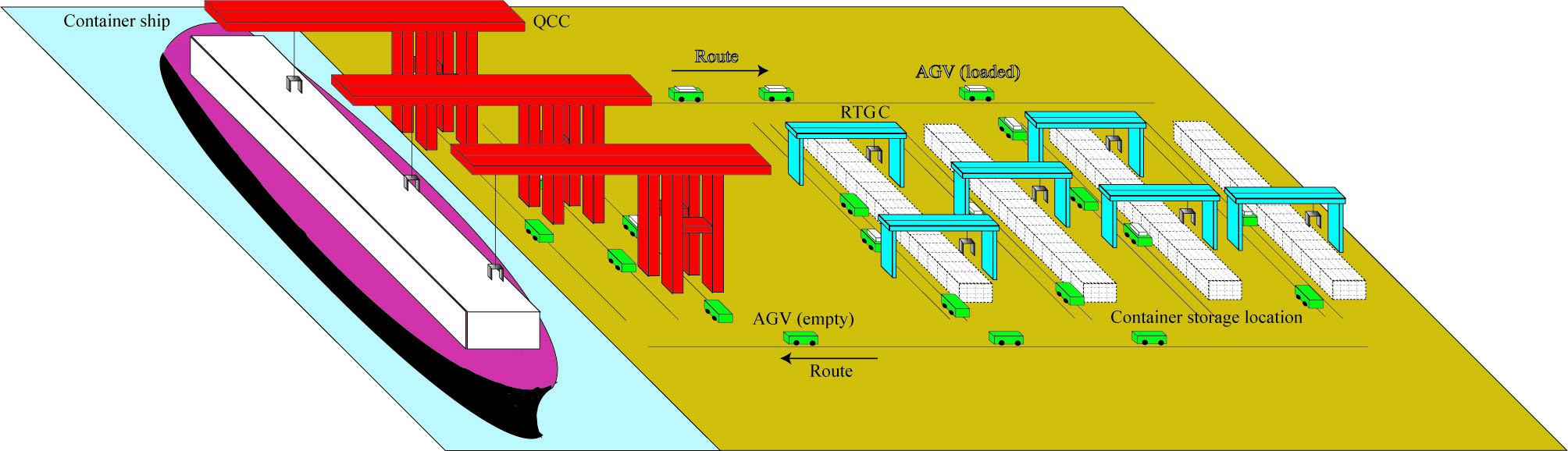
Two container transport systems with the AGVs are examined. One is vertical, and the other, horizontal. The vertical system is introduced in seaports in Netherlands and Germany and the horizontal system is introduced in Japan. These two systems are evaluated based on cost-effectiveness.
For this purpose, the system are first designed with the use of the proposed optimal design methodology. Then, the total construction costs of the systems for the various transportation demands are compared. Under the given conditions, the effectiveness of the horizontal system was identified.
(See a simulation movie: MOVIE)
Container-handling operational strategies for the robots
In a horizontal container transport system with the optimal number of robots, highly-efficient container-handling operational strategies are necessary for the robots. At first, suitable tasks, i.e., containers have to be given to AGVs. The AGVs have to transport them in a rapid manner. Then, ATCs are required to storage the containers with the shortest time.
Therefore, we construct the detailed management models, i.e., agent cooperation, container storage scheduling, and container transportation planning for the system. Then, we optimally design systems that are constructed with the use of the constructed management models. Comparisons of the systems are made to evaluate cost effectiveness based on the total construction cost and validity of the management models.
(See a simulation movie: MOVIE)
Improvement of existing container terminals
Existing container terminals are changed and redesigned as a demand changes. However, a local change and redesign of a system might cause a bottleneck; as a result, the well-balanced system is disrupted.
For this problem, we propose an improved design methodology to meet the changing demands of an existing automated container transport system. To achieve an improved design, it is essential to detect and correct any occurring bottlenecks. For this purpose, we exhaustively enumerate design proposals by constructing a logic tree. As a case study, we apply the methodology to an existing AGV transport system
(See a simulation movie: MOVIE)
Performance design of the robots
In addition to the design of the appropriate number of machines, efficient system layout, and system management models, we attempt to design robot performance. The objective of this study is to maximize the system efficiency while minimizing the changes of the performance. Therefore, we evaluate the performance based on the system throughput of the constructed system; then, make clear the impacts of the performance on the system.
(See the following movies: MOVIE (QCC loading: faster), MOVIE (QCC loading: slow), MOVIE (AGV velocity: faster), and MOVIE (AGV velocity: slow))
Robot Vision
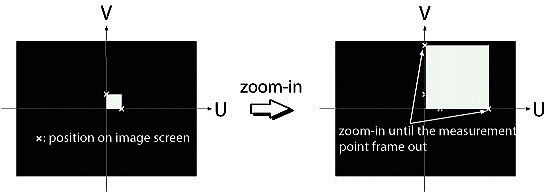
Measurement method with the zooming function
Image measurement is required for mobile robots with vision. Image measurement by stereo vision has a matching problem when there are similar objects in an environment. In order to avoid the matching problem, zooming measurement is applied using a monocular vision. The zooming measurement is possible to obtain 3D position of objects referring to two 2D images at distinct focus (view) points on the optical axis. The objects on the 2D images dynamically change with zooming.
Image measurement on the digital images has uncertain regions depending on the disparity and the image resolution. The disparity is dynamically changed in the zooming measurement. Therefore, it is necessary to evaluate uncertain regions with every disparity. This paper proposes an evaluation method of uncertain regions for zooming measurement. In this proposed method, the relationship between the disparity and the uncertain regions is shown on the experiments by using the actual zooming camera.
Key words: Zoom, Zooming Measurement, Image Measurement, Evaluation of Uncertain Region, Robot Vision